基于C8051F021的双通道轴角测量实验装置的设计
时间:11-05
来源:互联网
点击:
1.2.2 输入调理电路设计及A/D转换模块
C8051F021芯片内有一个完全由CIP-51通过特殊功能寄存器控制的片内12位SAR ADC(ADC0),一个9通道输入多路选择开关和可编程增益放大器。9个有一个输入通道被连到内部温度传感器,其他8个通道接外部输入且每一对都可被配置为两个单端输入或一个差分输入。
旋转变压器输出正弦和余弦两路信号,因此,双通道旋转变压器将输出四路信号。本设计中采用单端输入方式,将AIN0.0-AIN0.3四个端口作为单端输入口。ADC0的工作电压选择为0~2.4V,而旋转变压器输出的是双极性电压,因此,需对其调理,使其成为范围为0~2.4V的正极性电压信号,以满足ADC采样要求。调理电路如图3所示。运放U2输出一个负极性稳定电压,输入信号与之叠加后变为负极性信号,经运放U1反相放大调理至0~2.4V。二极管D1和D2为稳压二极管。

2 软件设计
软件由主模块、激磁信号产生、双通道角度信号采集转储、双通道角度计算与纠错及键盘显示5个模块组成。
2.1 激磁信号产生模块
通过查正弦函数表的方法,经过D/A转换成模拟量而输出正弦波。其波形的频率可以通过改变定时器的初值,即改变查表输出的时间来控制。
T3中断服务响应后,软件先清除中断标志,按次序输出正弦表数据给DAC0。由DAC0输出模拟的激磁信号。当数据表指针指向正弦波波峰时,启动一次ADC0采样。
2.2 双通道角度计算与纠错模块
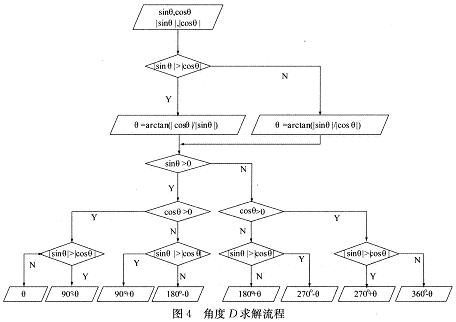
在实际应用中,快速准确确定粗、精机的读数是十分关键的,本设计中,通过采集由旋转变压器输出的正余弦值来算出当前的角度,计算的整体思想是先确定角度的卦限,然后根据正余弦值之商(即正切)来匹配角度值。将圆均分为八个卦限,沿逆时针方向依次编号为I、Ⅱ……Ⅷ。
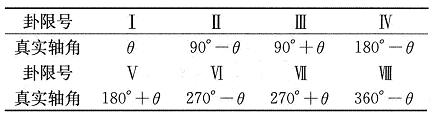
为得到真实轴角D,需解决两个问题:(1)确定D所处卦限(解决大范围问题);(2)确定D在各卦限中的角度θ是多少(解决小角度问题),本设计中,θ为真实轴角D偏离0°、90°、180°、270°、360°线的角度。真实轴角D在各卦限与θ关系如下表所示:
具体计算流程如图4所示。
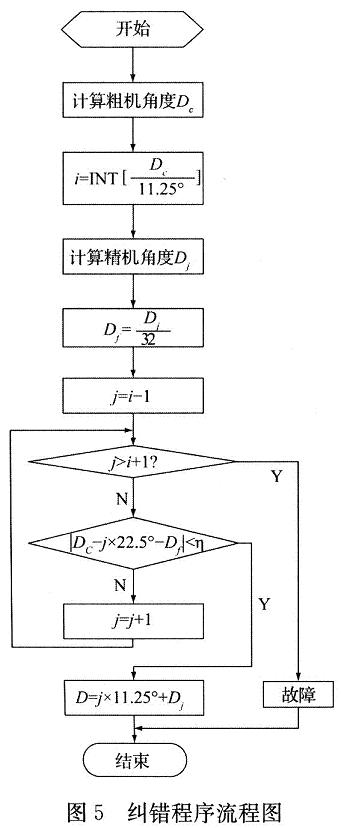
依此法可分别求得DC与Dj,经组合即可求得真实轴角值。
当待测角度小于0°或大于360°时,可将其加上或减去360°转化为0°~360°间的角度。
纠错程序流程如图5所示。
3 系统测试
3.1 实验测量
利用该装置,测得数据如表1所示:
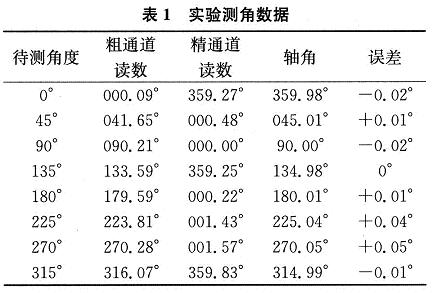
从表中可看出,测量值与真实值的误差控制在0.05°以内,表明装置具有较高精度。
3.2 纠错检测
选取易出错的特殊角度(0°、90°、180°、270°),通过转动旋转变压器,对其进行纠错检测,情况如表2所示。
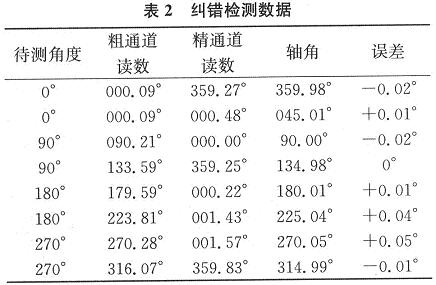
从表中可看出,对各个角度而言,无论出错情况是“超前”还是“滞后”,结果误差始终控制在0.05°以内,说明该装置具有较好的纠错能力。
4 结束语
本文设计了1:32双通道轴角测量实验装置,给出了软硬件实现,若应用于其他转速比的系统中,只需更改算法中相应部分的具体数值即可,因此方法具有普遍意义。由于充分利用了C8051F021内部集成的DAC、ADC等功能部件,硬件电路结构简单;程序采用模块化设计,条理清晰,可移植性强;系统运行稳定,测试结果可靠性高。文中采用的实现方法贴近实际,利于学习掌握测角原理,解决了实验教学需要,对实验教学和产品的进一步研发有很好的参考价值。
C8051F021芯片内有一个完全由CIP-51通过特殊功能寄存器控制的片内12位SAR ADC(ADC0),一个9通道输入多路选择开关和可编程增益放大器。9个有一个输入通道被连到内部温度传感器,其他8个通道接外部输入且每一对都可被配置为两个单端输入或一个差分输入。
旋转变压器输出正弦和余弦两路信号,因此,双通道旋转变压器将输出四路信号。本设计中采用单端输入方式,将AIN0.0-AIN0.3四个端口作为单端输入口。ADC0的工作电压选择为0~2.4V,而旋转变压器输出的是双极性电压,因此,需对其调理,使其成为范围为0~2.4V的正极性电压信号,以满足ADC采样要求。调理电路如图3所示。运放U2输出一个负极性稳定电压,输入信号与之叠加后变为负极性信号,经运放U1反相放大调理至0~2.4V。二极管D1和D2为稳压二极管。
2 软件设计
软件由主模块、激磁信号产生、双通道角度信号采集转储、双通道角度计算与纠错及键盘显示5个模块组成。
2.1 激磁信号产生模块
通过查正弦函数表的方法,经过D/A转换成模拟量而输出正弦波。其波形的频率可以通过改变定时器的初值,即改变查表输出的时间来控制。
T3中断服务响应后,软件先清除中断标志,按次序输出正弦表数据给DAC0。由DAC0输出模拟的激磁信号。当数据表指针指向正弦波波峰时,启动一次ADC0采样。
2.2 双通道角度计算与纠错模块
在实际应用中,快速准确确定粗、精机的读数是十分关键的,本设计中,通过采集由旋转变压器输出的正余弦值来算出当前的角度,计算的整体思想是先确定角度的卦限,然后根据正余弦值之商(即正切)来匹配角度值。将圆均分为八个卦限,沿逆时针方向依次编号为I、Ⅱ……Ⅷ。
为得到真实轴角D,需解决两个问题:(1)确定D所处卦限(解决大范围问题);(2)确定D在各卦限中的角度θ是多少(解决小角度问题),本设计中,θ为真实轴角D偏离0°、90°、180°、270°、360°线的角度。真实轴角D在各卦限与θ关系如下表所示:
具体计算流程如图4所示。
依此法可分别求得DC与Dj,经组合即可求得真实轴角值。
当待测角度小于0°或大于360°时,可将其加上或减去360°转化为0°~360°间的角度。
纠错程序流程如图5所示。
3 系统测试
3.1 实验测量
利用该装置,测得数据如表1所示:
从表中可看出,测量值与真实值的误差控制在0.05°以内,表明装置具有较高精度。
3.2 纠错检测
选取易出错的特殊角度(0°、90°、180°、270°),通过转动旋转变压器,对其进行纠错检测,情况如表2所示。
从表中可看出,对各个角度而言,无论出错情况是“超前”还是“滞后”,结果误差始终控制在0.05°以内,说明该装置具有较好的纠错能力。
4 结束语
本文设计了1:32双通道轴角测量实验装置,给出了软硬件实现,若应用于其他转速比的系统中,只需更改算法中相应部分的具体数值即可,因此方法具有普遍意义。由于充分利用了C8051F021内部集成的DAC、ADC等功能部件,硬件电路结构简单;程序采用模块化设计,条理清晰,可移植性强;系统运行稳定,测试结果可靠性高。文中采用的实现方法贴近实际,利于学习掌握测角原理,解决了实验教学需要,对实验教学和产品的进一步研发有很好的参考价值。
电子 变压器 ADC DAC C语言 单片机 LCD 传感器 电路 电压 放大器 电阻 电容 二极管 温度传感器 相关文章:
- 利用蓝牙技术和远程信息控制单元实现汽车诊断(11-13)
- 六大特点助CMOS图像传感器席卷医疗电子应用(11-13)
- 汽车网络的分类及发展趋向(11-13)
- 多核嵌入式处理技术推动汽车技术发展(11-18)
- CAN总线的客车轻便换档系统设计与实现(02-13)
- 高性能嵌入式ARM MPU在医疗电子系统中的设计应用(05-12)