一种基于ARM的新型智能化航迹仪的设计
时间:11-03
来源:互联网
点击:
3.2 XC2S50接口板部分的软件设计
XC2S50接口板软件部分采用VHDL语言编写。编译后通过JTAG口烧写入配置芯片18V01中。软件部分主要包括顶层模块jkb_top、接口模块jiekou、脉冲发生模块pulse_generate、速度控制模块speed_ctr、脉冲计数模块counter、方波发生器counter32等。其结构框图如图6所示。
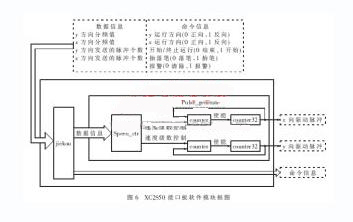
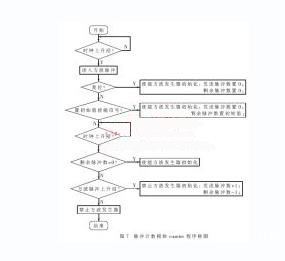
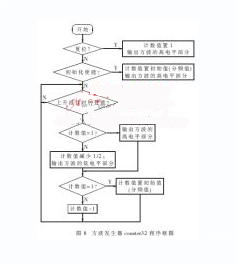
在脉冲发生模块pulse_generate中,速度控制模块speed_ctr的主要功能是:通过查询发送、剩余脉冲数,计算出响应的速度控制级别(可分为4种模式),将速度控制信息传送给脉冲计数模块counter。两个脉冲计数模块counter分别控制X、Y两个步进电机的走步步数。它们分别以X、Y向驱动脉冲作为输入时钟信号,纪录两向脉冲数,发出使能信号以控制counter32,其原理如图7所示。两个方波发生模块counter32分别对X向、Y向步进电机驱动器输出方波,其输出波形的频率即为步进电机的走步频率,如图8所示。接口模块jiekou接收来自主板发送的X、Y向分频值、脉冲数数据信息,以及运行方向、开始终止、抬落笔、报警等控制信息,并将数据信息发送给pulse_generate模块,将控制信息发送给驱动板。所有的软件模块封装在顶层模块jkb_top中。
新型智能化航迹仪设计,针对传统航迹仪系统的诸多问题,给出了有效的改造方案。改造方案降低了成本,增强了功能的针对性,节省了系统资源。数字化板的使用,为原开环系统增加了闭环反馈,提高了标绘精度。使用FPGA器件代替原CDT800接口板,保证系统的时事性与稳定性,提高了集成度。CAN总线通讯的采用,增大了信息的承载量,提高了实时性。LCD触摸显示屏的使用,增强了人机交互性。使用带有细分功能的电机驱动器,及对传统航迹仪步进电机部分的优化改造,降低了工作的振动与噪音,提高了工作稳定性。
XC2S50接口板软件部分采用VHDL语言编写。编译后通过JTAG口烧写入配置芯片18V01中。软件部分主要包括顶层模块jkb_top、接口模块jiekou、脉冲发生模块pulse_generate、速度控制模块speed_ctr、脉冲计数模块counter、方波发生器counter32等。其结构框图如图6所示。
在脉冲发生模块pulse_generate中,速度控制模块speed_ctr的主要功能是:通过查询发送、剩余脉冲数,计算出响应的速度控制级别(可分为4种模式),将速度控制信息传送给脉冲计数模块counter。两个脉冲计数模块counter分别控制X、Y两个步进电机的走步步数。它们分别以X、Y向驱动脉冲作为输入时钟信号,纪录两向脉冲数,发出使能信号以控制counter32,其原理如图7所示。两个方波发生模块counter32分别对X向、Y向步进电机驱动器输出方波,其输出波形的频率即为步进电机的走步频率,如图8所示。接口模块jiekou接收来自主板发送的X、Y向分频值、脉冲数数据信息,以及运行方向、开始终止、抬落笔、报警等控制信息,并将数据信息发送给pulse_generate模块,将控制信息发送给驱动板。所有的软件模块封装在顶层模块jkb_top中。
新型智能化航迹仪设计,针对传统航迹仪系统的诸多问题,给出了有效的改造方案。改造方案降低了成本,增强了功能的针对性,节省了系统资源。数字化板的使用,为原开环系统增加了闭环反馈,提高了标绘精度。使用FPGA器件代替原CDT800接口板,保证系统的时事性与稳定性,提高了集成度。CAN总线通讯的采用,增大了信息的承载量,提高了实时性。LCD触摸显示屏的使用,增强了人机交互性。使用带有细分功能的电机驱动器,及对传统航迹仪步进电机部分的优化改造,降低了工作的振动与噪音,提高了工作稳定性。
步进电机 电路 电动机 ARM LCD 触摸屏 FPGA 嵌入式 总线 CAN总线 Xilinx 电流 VxWorks C语言 显示器 VHDL 相关文章:
- 单片机控制步进电机驱动器工作原理(10-19)
- 基于FPGA的步进电机控制器设计(02-12)
- 基于单片机的步进电机控制系统设计(09-13)
- 步进电机及驱动器的正确选择方法(10-01)
- 新的步进电机控制器/驱动器简化步进电机系统设计(10-29)
- 基于Beckhoff嵌入式PC控制器的步进电机群控系统设计(11-10)