一种基于ARM的新型智能化航迹仪的设计
时间:11-03
来源:互联网
点击:
航迹仪是舰船导航系统中的主要配套设备之一,它能根据陀螺罗经、计程仪提供的航向航程信息或其他导航设备提供的定位信息,在海图上自动连续地绘制出船舶航行的航迹与标记。航迹仪具备的绘制航线导航功能,可使航海人员非常直观的了解到己船位置、偏航程度及未来海域的安全程度。
随着计算机技术的发展,智能化航迹仪的发展趋势是进一步拓宽功能、缩小体积、降低功耗、减少成本、提高可靠性,而传统的航迹仪系统不完全具备上述功能,存在局限性。
1 航迹仪工作原理
航迹仪的工作过程是在计算机控制下进行的。首先,使键盘处于开放状态,通过移笔键和自检键简单检查绘图功能;然后,由综导显控台装海图并向航迹仪发出装海图命令,由此航迹仪自动进入跟踪状态。船舶航迹的实时标绘是通过实时接收由综导显控台发送的纬度、经度值及各种绘图命令,通过数学模型的解算及直线插补运算后,产生步进电机的控制脉冲序列,经功放电路驱动电动机执行,再经机械转换变成绘笔在图面上运动。
传统的航迹仪系统有一定的局限性,存在有待改进之处:(1)传统的航迹仪系统的接口、控制、传动等部分采用分立式设计,占用了大量的空间,且价格较贵。(2)随着导航数据信息化程度的提高,设备间的通讯越发频繁,信息量亦随之增大,使用单一的串行口通讯已不能满足系统要求。(3)航迹仪与综导台使用同一操作界面,缺少独立的人机交互系统。(4)传统的航迹仪为开环系统,无检测反馈装置,影响了走笔的精度。(5)接口板的设计动态初始化要求严格,不能完全满足实时性要求。另外,传统航迹仪传动部分的振动及噪音较大,从另一方面影响了绘笔的精度。新型智能化航迹仪的设计对以上问题给出了解决方案。
2 航迹仪系统的硬件设计
2.1 硬件系统的总体构成
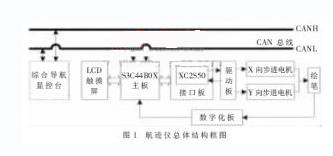
航迹仪微机控制系统是以ARM处理器S3C44B0X模块为中心的控制系统。系统由以下几部分组成:基于ARM处理器S3C44B0X的开发板, STN 型320像素X240行LCD彩色液晶触摸屏,基于FPGA元件XC2S50的接口板,步进电机驱动及控制电路,步进电动机,数字化板。系统的硬件结构如图1所示。
2.2 S3C44B0X主板
传统的航迹仪采用嵌入式PC/104模块为核心控制系统。系统的接口、控制、传动等部分采用分立式设计,占用的空间较大,且价格昂贵。因此在改进设计中使用基于Samsung公司生产的ARM处理器S3C44B0X芯片。由于使用基于芯片开发的主板提高设计开发的灵活性,为本系统所专用,因此所用接口、外设均为自主设计的电路,节省了不必要的开销。这种设计提高了系统的响应速度,降低了成本。另外,S3C44B0X自带LCD控制器,能够保证改进设计中触摸屏显示部分的顺利实现。
S3C44B0X主板主要包括CPU模块及其辅助电路、存储器系统模块、通信模块、系统调试模块、人机接口模块及扩展总线部分。
主板外接CAN总线控制器及总线驱动器等设备,接收CAN总线上由综合导航显控台发送的实时位置、航向信息;通过人机接口接收到的触摸屏发送的控制信息,经处理后将控制命令(主要是控制脉冲频率、脉冲个数、开始停止等命令)通过扩展I/O口发送给接口板,另外,将显示信息发送给LCD触摸显示屏。
2.3 XC2S50接口板
传统航迹仪使用接口板CDT800,其中包括 Am9513计数器与μPD71055I/O接口。CDT800为成品接口板,其计数器Am9513相关资料相对有限,且动态初始化要求严格,在实际应用过程中,对系统资源的占用过大,严重影响系统的实时性。在改进设计中,采用基于Xilinx公司生产的FPGA元件XC2S50的接口板。这种设计提高了系统的集成化,保证了实时性,使得硬件的设计开发更加简便。
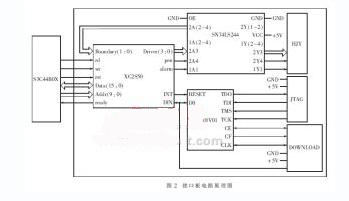
XC2S50接口板包括FPGA芯片XC2S50、配置芯片18V01、输出驱动芯片SN74LS244及外部接口电路。其原理图见图2。
开发论坛
接口板的主要功能是:接收S3C44B0X主板通过数据总线发送的数据命令信息(包括:X、Y方向的分频值、脉冲个数、运行方向,以及开始/终止运行、抬落笔、报警等),经FPGA芯片XC2S50处理后,转化为相应频率的脉冲信号;再经输出驱动芯片SN74LS244,通过接口HJY传递给X、Y向的步进电机驱动器。运行程序通过JTAG口或DOWNLOAD口烧写入配置芯片18V01中。
2.4 步进电机及其驱动器
对于航迹仪系统,标绘精度是极其重要的一项技术指标,而电机及传动机构的精度则对其产生直接影响。
航迹仪控制系统对快速性及定位精度均有很高的要求。考虑到系统是针对数字量及位移的控制系统,因此选用步进电机作为其执行元件。步进电机是一种将电脉冲转换成相应角位移的电机元件,当外加一个脉冲信号于电机的控制装置时,其转轴就转过一个固定的角度(步距角),即前进了一步。
系统要求绘笔绘制大量细小折线,这就要求电机工作在低频区且需要频繁地执行起动、停止、调速等操作。因此步进电机极易出现低频振荡,产生工作噪音,影响绘笔的稳定性及标绘精度。因此,改进方案采用了先进的细分驱动器,大大降低了低频振荡。
本设计选用RORZE公司生产的5相混合式步进电机M56853D及相应的5相细分步步进电机驱动器RD-0534M。
步进电机M56853D各技术参数:
最大静转矩Mk=8.0kg·cm;电流I=3.5A/相;转子转动惯量Jr=0.240g·cm·S2;步距角(整步时)θb== 0.72°;容许径向负载10.5kg;容许轴向负载1.5kg;转子齿数Zr=100。
细分驱动器RD-0534M各技术参数:
改进后航迹仪系统电机步距角变为原系统的1/80,步距分辨率及控制脉冲频率均得到提高。提高后的控制脉冲频率大大超过了自由振动频率f0,从而避免了系统的低频振荡。
随着计算机技术的发展,智能化航迹仪的发展趋势是进一步拓宽功能、缩小体积、降低功耗、减少成本、提高可靠性,而传统的航迹仪系统不完全具备上述功能,存在局限性。
1 航迹仪工作原理
航迹仪的工作过程是在计算机控制下进行的。首先,使键盘处于开放状态,通过移笔键和自检键简单检查绘图功能;然后,由综导显控台装海图并向航迹仪发出装海图命令,由此航迹仪自动进入跟踪状态。船舶航迹的实时标绘是通过实时接收由综导显控台发送的纬度、经度值及各种绘图命令,通过数学模型的解算及直线插补运算后,产生步进电机的控制脉冲序列,经功放电路驱动电动机执行,再经机械转换变成绘笔在图面上运动。
传统的航迹仪系统有一定的局限性,存在有待改进之处:(1)传统的航迹仪系统的接口、控制、传动等部分采用分立式设计,占用了大量的空间,且价格较贵。(2)随着导航数据信息化程度的提高,设备间的通讯越发频繁,信息量亦随之增大,使用单一的串行口通讯已不能满足系统要求。(3)航迹仪与综导台使用同一操作界面,缺少独立的人机交互系统。(4)传统的航迹仪为开环系统,无检测反馈装置,影响了走笔的精度。(5)接口板的设计动态初始化要求严格,不能完全满足实时性要求。另外,传统航迹仪传动部分的振动及噪音较大,从另一方面影响了绘笔的精度。新型智能化航迹仪的设计对以上问题给出了解决方案。
2 航迹仪系统的硬件设计
2.1 硬件系统的总体构成
航迹仪微机控制系统是以ARM处理器S3C44B0X模块为中心的控制系统。系统由以下几部分组成:基于ARM处理器S3C44B0X的开发板, STN 型320像素X240行LCD彩色液晶触摸屏,基于FPGA元件XC2S50的接口板,步进电机驱动及控制电路,步进电动机,数字化板。系统的硬件结构如图1所示。
2.2 S3C44B0X主板
传统的航迹仪采用嵌入式PC/104模块为核心控制系统。系统的接口、控制、传动等部分采用分立式设计,占用的空间较大,且价格昂贵。因此在改进设计中使用基于Samsung公司生产的ARM处理器S3C44B0X芯片。由于使用基于芯片开发的主板提高设计开发的灵活性,为本系统所专用,因此所用接口、外设均为自主设计的电路,节省了不必要的开销。这种设计提高了系统的响应速度,降低了成本。另外,S3C44B0X自带LCD控制器,能够保证改进设计中触摸屏显示部分的顺利实现。
S3C44B0X主板主要包括CPU模块及其辅助电路、存储器系统模块、通信模块、系统调试模块、人机接口模块及扩展总线部分。
主板外接CAN总线控制器及总线驱动器等设备,接收CAN总线上由综合导航显控台发送的实时位置、航向信息;通过人机接口接收到的触摸屏发送的控制信息,经处理后将控制命令(主要是控制脉冲频率、脉冲个数、开始停止等命令)通过扩展I/O口发送给接口板,另外,将显示信息发送给LCD触摸显示屏。
2.3 XC2S50接口板
传统航迹仪使用接口板CDT800,其中包括 Am9513计数器与μPD71055I/O接口。CDT800为成品接口板,其计数器Am9513相关资料相对有限,且动态初始化要求严格,在实际应用过程中,对系统资源的占用过大,严重影响系统的实时性。在改进设计中,采用基于Xilinx公司生产的FPGA元件XC2S50的接口板。这种设计提高了系统的集成化,保证了实时性,使得硬件的设计开发更加简便。
XC2S50接口板包括FPGA芯片XC2S50、配置芯片18V01、输出驱动芯片SN74LS244及外部接口电路。其原理图见图2。
开发论坛
接口板的主要功能是:接收S3C44B0X主板通过数据总线发送的数据命令信息(包括:X、Y方向的分频值、脉冲个数、运行方向,以及开始/终止运行、抬落笔、报警等),经FPGA芯片XC2S50处理后,转化为相应频率的脉冲信号;再经输出驱动芯片SN74LS244,通过接口HJY传递给X、Y向的步进电机驱动器。运行程序通过JTAG口或DOWNLOAD口烧写入配置芯片18V01中。
2.4 步进电机及其驱动器
对于航迹仪系统,标绘精度是极其重要的一项技术指标,而电机及传动机构的精度则对其产生直接影响。
航迹仪控制系统对快速性及定位精度均有很高的要求。考虑到系统是针对数字量及位移的控制系统,因此选用步进电机作为其执行元件。步进电机是一种将电脉冲转换成相应角位移的电机元件,当外加一个脉冲信号于电机的控制装置时,其转轴就转过一个固定的角度(步距角),即前进了一步。
系统要求绘笔绘制大量细小折线,这就要求电机工作在低频区且需要频繁地执行起动、停止、调速等操作。因此步进电机极易出现低频振荡,产生工作噪音,影响绘笔的稳定性及标绘精度。因此,改进方案采用了先进的细分驱动器,大大降低了低频振荡。
本设计选用RORZE公司生产的5相混合式步进电机M56853D及相应的5相细分步步进电机驱动器RD-0534M。
步进电机M56853D各技术参数:
最大静转矩Mk=8.0kg·cm;电流I=3.5A/相;转子转动惯量Jr=0.240g·cm·S2;步距角(整步时)θb== 0.72°;容许径向负载10.5kg;容许轴向负载1.5kg;转子齿数Zr=100。
细分驱动器RD-0534M各技术参数:
改进后航迹仪系统电机步距角变为原系统的1/80,步距分辨率及控制脉冲频率均得到提高。提高后的控制脉冲频率大大超过了自由振动频率f0,从而避免了系统的低频振荡。
步进电机 电路 电动机 ARM LCD 触摸屏 FPGA 嵌入式 总线 CAN总线 Xilinx 电流 VxWorks C语言 显示器 VHDL 相关文章:
- 单片机控制步进电机驱动器工作原理(10-19)
- 基于FPGA的步进电机控制器设计(02-12)
- 基于单片机的步进电机控制系统设计(09-13)
- 步进电机及驱动器的正确选择方法(10-01)
- 新的步进电机控制器/驱动器简化步进电机系统设计(10-29)
- 基于Beckhoff嵌入式PC控制器的步进电机群控系统设计(11-10)