基于XC164CS和BTS7741G的中央门锁控制设计
时间:11-03
来源:互联网
点击:
门锁部分的软件设计
门锁软件的算法就是在适当的状态中控制适当的桥臂导通或者关断。在门锁开启或者关闭时需要上下各一个桥臂导通,在开启或者关断之后需要进行续流,这时就只需要关断下桥臂,而让上桥臂导通一段时间即可。其具体的控制算法可以参考图7所示的门锁的状态流图。
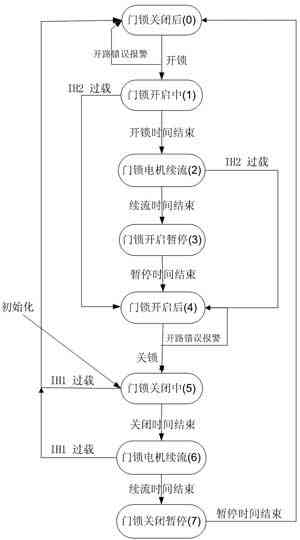
图7 门锁控制状态流图
表1给出了门锁的几种工作状态。
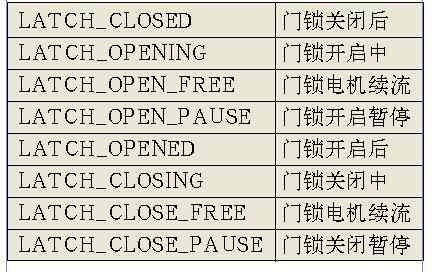
各个工作状态之间的转换并不是都由控制命令ubCmdLatch来触发激活的。从LATCH_CLOSED到LATCH_OPENING和从LATCH_OPENED到LATCH_CLOSING这两次转换是由ubCmdLatch来触发的,其意义就是在得到开启或者关闭的命令后,门锁从静止的状态开始变化到运动的状态,也就是门锁从关闭的静止状态开始开启,或者在打开后开始关闭。在PASSAT B5电动车门中使用了电动门锁,门锁开启或者闭合都是由电机带动锁插销前后移动来实现的。而BTS7741G内部就是一个简单的H桥电路,因此就是通过程序控制H桥在合适的时间开启适当的上下桥臂,达到控制门锁电机正反转的目的。在LATCH_OPENING 和LATCH_CLOSING这两个状态中就编写了控制一对上下桥臂管导通的命令。而在状态LATCH_CLOSED和 LATCH_OPENED中,四个管子都不导通。
其余各个状态之间的转换都不是由控制命令触发的,有些是通过定时,有些则是通过错误的检测。故障检测功能通过监视ST引脚输出电平实现。在正常状态下,ST引脚输出高电平;当发生故障时,ST引脚输出为低电平。具体的状态切换可以从图7中清楚的看到。例如,从状态LATCH_OPENING到LATCH_OPEN_FREE就是计时到门锁开启时间(LATCH_OPENING_TIME)结束,而如果检测到开路故障或过载故障,门锁会一直保持在LATCH_CLOSED或者LATCH_OPENED状态下。
通过对智能功率芯片BTS7741G的工作特性及故障检测特性的研究与分析,对该芯片的安全性给与了肯定,确保了本设计的正确性和可靠性。
门锁软件的算法就是在适当的状态中控制适当的桥臂导通或者关断。在门锁开启或者关闭时需要上下各一个桥臂导通,在开启或者关断之后需要进行续流,这时就只需要关断下桥臂,而让上桥臂导通一段时间即可。其具体的控制算法可以参考图7所示的门锁的状态流图。
图7 门锁控制状态流图
表1给出了门锁的几种工作状态。
各个工作状态之间的转换并不是都由控制命令ubCmdLatch来触发激活的。从LATCH_CLOSED到LATCH_OPENING和从LATCH_OPENED到LATCH_CLOSING这两次转换是由ubCmdLatch来触发的,其意义就是在得到开启或者关闭的命令后,门锁从静止的状态开始变化到运动的状态,也就是门锁从关闭的静止状态开始开启,或者在打开后开始关闭。在PASSAT B5电动车门中使用了电动门锁,门锁开启或者闭合都是由电机带动锁插销前后移动来实现的。而BTS7741G内部就是一个简单的H桥电路,因此就是通过程序控制H桥在合适的时间开启适当的上下桥臂,达到控制门锁电机正反转的目的。在LATCH_OPENING 和LATCH_CLOSING这两个状态中就编写了控制一对上下桥臂管导通的命令。而在状态LATCH_CLOSED和 LATCH_OPENED中,四个管子都不导通。
其余各个状态之间的转换都不是由控制命令触发的,有些是通过定时,有些则是通过错误的检测。故障检测功能通过监视ST引脚输出电平实现。在正常状态下,ST引脚输出高电平;当发生故障时,ST引脚输出为低电平。具体的状态切换可以从图7中清楚的看到。例如,从状态LATCH_OPENING到LATCH_OPEN_FREE就是计时到门锁开启时间(LATCH_OPENING_TIME)结束,而如果检测到开路故障或过载故障,门锁会一直保持在LATCH_CLOSED或者LATCH_OPENED状态下。
通过对智能功率芯片BTS7741G的工作特性及故障检测特性的研究与分析,对该芯片的安全性给与了肯定,确保了本设计的正确性和可靠性。
电子 半导体 继电器 嵌入式 电路 总线 电流 汽车电子 电阻 电压 PWM 相关文章:
- 利用蓝牙技术和远程信息控制单元实现汽车诊断(11-13)
- 六大特点助CMOS图像传感器席卷医疗电子应用(11-13)
- 汽车网络的分类及发展趋向(11-13)
- 多核嵌入式处理技术推动汽车技术发展(11-18)
- CAN总线的客车轻便换档系统设计与实现(02-13)
- 高性能嵌入式ARM MPU在医疗电子系统中的设计应用(05-12)