单片机扩展触摸屏人机接口的应用实例
时间:08-02
来源:互联网
点击:
触摸屏
如图1,典型触摸屏的工作部分一般由三部分组成:两层透明的阻性导体层、两层导体之间的隔离层、电极。阻性导体层选用阻性材料,如铟锡氧化物(ITO)涂在衬底上构成,上层衬底用塑料,下层衬底用玻璃。隔离层为粘性绝缘液体材料,如聚脂薄膜。电极选用导电性能极好的材料(如银粉墨)构成,其导电性能大约为ITO的1000倍。
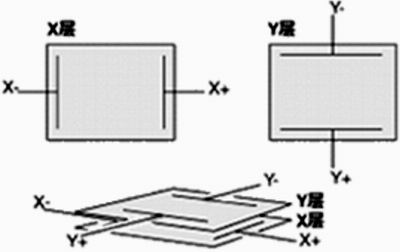
图1 触摸屏
触摸屏工作时,上下导体层相当于电阻网络。当某一层电极加上电压时,会在该网络上形成电压梯度。如有外力使得上下两层在某一点接触,则在电极未加电压的另一层可以测得接触点处的电压,从而知道接触点处的坐标。比如,在顶层的电极(X+,X-)上加上电压,则在顶层导体层上形成电压梯度,当有外力使得上下两层在某一点接触,在底层就可以测得接触点处的电压,再根据该电压与电极(X+)之间的距离关系,知道该处的X坐标。然后,将电压切换到底层电极(Y+,Y-)上,并在顶层测量接触点处的电压,从而知道Y坐标。四线制电阻触摸屏也是目前最常用的触摸屏产品。本系统中选用AMT9502。
触摸屏控制器硬件设计
Atmega128 单片机是Atmel公司的8位RISC单片机,片内有128Kflash、4K RAM、4K EEPROM、两个可编程的USART、1个可工作在主机/从机的SPI串行接口。此外还有丰富的I/O接口,8通道10位分辨率ADC转换器等硬件资源。
单片机最小系统设计如图2所示。低电压版本的 Atmega 128支持3.3V、5V两种供电电压,本系统采用5V供电,便于供电电压统一。晶振采用常规直插晶振7.373800M,选用标准晶振的目的主要是为了提高USART通讯波特率的准确性,使单片机能够使用于比较高的通讯波特率。复位电路采用常规的RC复位,没有使用特殊的复位器件,Atmega 128已经内置了看门狗,并且可以通过编程使看门狗在程序启动前启动,即上电后程序启动前,看门狗已经启动,这样系统的可靠性可以得到保证,看门狗最高分频系数是2048K,最小分频系统是16K。系统中PB0(SS)已经直接接到+5V,这样硬件配置了单片机为主机,下面所有外挂的均为从机,本系统外挂只有一个就是ADS7843。单片机和触摸屏控制器连接如图3所示,PB1(CLK) 为SPI时钟,PB2(MOSI)为SPI主机输出从机输入, PB3(MISO)SPI主机输入从机输出。这三根线为SPI总线。
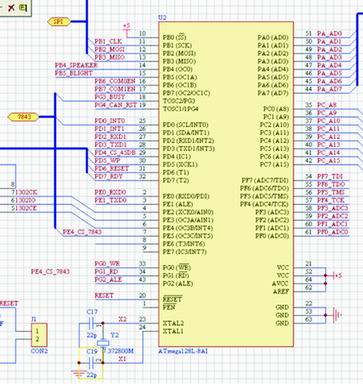
图2 单片机最小系统图
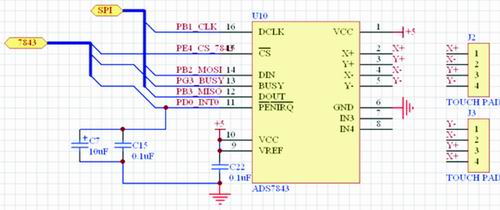
图3 单片机和触摸屏控制器连接图
ADS7843是TI公司的触摸屏控制器芯片 专门应用于四线电阻式触摸屏,最高达到125K的转换率 8位或者12位可编程精度。外部参考电压范围从1V到VCC均可,VCC最高电压为5V,高速低功耗使得ADS7843非常适合于使用电阻触摸屏的手持设备。宽温度设计使得它很适用于大量的工业现场。
ADS7843连接触摸屏的示意图如图4所示。
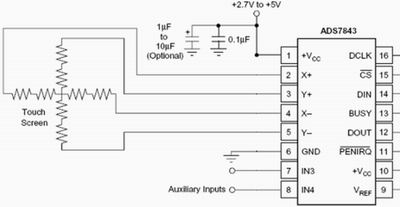
图4 ADS7843和触摸屏连接图
触摸屏是一个四线电阻屏幕,可以示意出两个电阻,测量X方向的时候,将X+,X-之间加上参考电压Vref,Y-断开,Y+作为A/D输入,进行A/D转换获得X方向的电压,同理测量Y方向的时候,将Y+,Y-之间加上参考电压Vref,X-断开,X+作为A/D输入,进行A/D转换获得Y方向的电压,之后再完成电压与坐标的换算。整个过程类似一个电位器,触摸不同的位置分得不同的电压。
以上所需要的加参考电压断开A/D转换等工作都是ADS7843直接完成的,只需要将相应的命令传输到ADS7843即可,等待转换周期完成,检测到BUSY信号不再忙,即可以获得相应电压的数据。
此外PENIRQ一般需要一个上拉电阻,因为ADS7843是一个OC门输出结构,本系统中直接使用Atmega 128内部的上拉电阻。单片机中断系统中将INT0分配给触摸屏控制器,并且设定成低电平触发,这样可以检测按键时间,可以用按键长短处理不同的功能。
触摸屏控制器驱动程序
驱动程序的编写与硬件的设计是直接相关,驱动程序是以上面所设计的硬件为基础的。

表1 ADS7843的控制字及数据传输格式
根据ADS7843的Datasheet,ADS7843的控制字及数据传输格式如表1。其中S为数据传输起始标志位,该位必为“1”。A2~A0进行通道选择。MODE用来选择A/D转换的精度,“1”选择8位,“0”选择12位。SER/选择参考电压的输入模式。PD1、PD0选择省电模式:“00”省电模式允许,在两次A/D转换之间掉电,且中断允许;“01”同“00”,只是不允许中断;“10”保留;“11”禁止省电模式。
为了完成一次电极电压切换和A/D转换,需要先通过串口往ADS7843发送控制字,转换完成后再通过串口读出电压转换值。标准的一次转换需要24个时钟周期。由于串口支持双向同时进行传送,并且在一次读数与下一次发控制字之间可以重叠,所以转换速率可以提高到每次16个时钟周期。如果条件允许,CPU可以产生15个CLK的话(比如FPGA和ASIC),转换速率还可以提高到每次15个时钟周期。
所以我们选择控制字 :
0x94-----X+输入得到Y AD值 0xe4----Y+输入得到X AD值
SPI初始化程序:
void spi_init(void)
{
SPCR = 0x53; //setup SPI
SPSR = 0x00; //setup SPI
}
SPI主机传输函数:
void SPI_MasterTransmit(char cData)
{
SPDR = cData; /* 启动数据传输 */
while(!(SPSR & (1<<SPIF))); /*等待传输
结束*/
}
读取ADS7843的模拟量值;
unsigned int Get_Touch_Ad(unsigned char
channel)
{
unsigned int ad_tem;
SPI_MasterTransmit(channel);//发送控制字
if(PING&&0x08==0) ; //判断busy
delayms(1);
SPI_MasterTransmit(0);
delayms(1); //等待发送完毕
ad_tem=SPDR;
ad_tem=ad_tem<<8;
SPI_MasterTransmit(0); //启动spi传送
delayms(1); //等待发送完毕
ad_tem|=SPDR;
ad_tem=ad_tem>>4;
return(ad_tem); //返回的参数
}
不同的用户还需根据自己设计的系统,做一个简单的四点校正程序,这样可以获得一个精确度较高的触摸屏坐标体系。
如图1,典型触摸屏的工作部分一般由三部分组成:两层透明的阻性导体层、两层导体之间的隔离层、电极。阻性导体层选用阻性材料,如铟锡氧化物(ITO)涂在衬底上构成,上层衬底用塑料,下层衬底用玻璃。隔离层为粘性绝缘液体材料,如聚脂薄膜。电极选用导电性能极好的材料(如银粉墨)构成,其导电性能大约为ITO的1000倍。
图1 触摸屏
触摸屏工作时,上下导体层相当于电阻网络。当某一层电极加上电压时,会在该网络上形成电压梯度。如有外力使得上下两层在某一点接触,则在电极未加电压的另一层可以测得接触点处的电压,从而知道接触点处的坐标。比如,在顶层的电极(X+,X-)上加上电压,则在顶层导体层上形成电压梯度,当有外力使得上下两层在某一点接触,在底层就可以测得接触点处的电压,再根据该电压与电极(X+)之间的距离关系,知道该处的X坐标。然后,将电压切换到底层电极(Y+,Y-)上,并在顶层测量接触点处的电压,从而知道Y坐标。四线制电阻触摸屏也是目前最常用的触摸屏产品。本系统中选用AMT9502。
触摸屏控制器硬件设计
Atmega128 单片机是Atmel公司的8位RISC单片机,片内有128Kflash、4K RAM、4K EEPROM、两个可编程的USART、1个可工作在主机/从机的SPI串行接口。此外还有丰富的I/O接口,8通道10位分辨率ADC转换器等硬件资源。
单片机最小系统设计如图2所示。低电压版本的 Atmega 128支持3.3V、5V两种供电电压,本系统采用5V供电,便于供电电压统一。晶振采用常规直插晶振7.373800M,选用标准晶振的目的主要是为了提高USART通讯波特率的准确性,使单片机能够使用于比较高的通讯波特率。复位电路采用常规的RC复位,没有使用特殊的复位器件,Atmega 128已经内置了看门狗,并且可以通过编程使看门狗在程序启动前启动,即上电后程序启动前,看门狗已经启动,这样系统的可靠性可以得到保证,看门狗最高分频系数是2048K,最小分频系统是16K。系统中PB0(SS)已经直接接到+5V,这样硬件配置了单片机为主机,下面所有外挂的均为从机,本系统外挂只有一个就是ADS7843。单片机和触摸屏控制器连接如图3所示,PB1(CLK) 为SPI时钟,PB2(MOSI)为SPI主机输出从机输入, PB3(MISO)SPI主机输入从机输出。这三根线为SPI总线。
图2 单片机最小系统图
图3 单片机和触摸屏控制器连接图
ADS7843是TI公司的触摸屏控制器芯片 专门应用于四线电阻式触摸屏,最高达到125K的转换率 8位或者12位可编程精度。外部参考电压范围从1V到VCC均可,VCC最高电压为5V,高速低功耗使得ADS7843非常适合于使用电阻触摸屏的手持设备。宽温度设计使得它很适用于大量的工业现场。
ADS7843连接触摸屏的示意图如图4所示。
图4 ADS7843和触摸屏连接图
触摸屏是一个四线电阻屏幕,可以示意出两个电阻,测量X方向的时候,将X+,X-之间加上参考电压Vref,Y-断开,Y+作为A/D输入,进行A/D转换获得X方向的电压,同理测量Y方向的时候,将Y+,Y-之间加上参考电压Vref,X-断开,X+作为A/D输入,进行A/D转换获得Y方向的电压,之后再完成电压与坐标的换算。整个过程类似一个电位器,触摸不同的位置分得不同的电压。
以上所需要的加参考电压断开A/D转换等工作都是ADS7843直接完成的,只需要将相应的命令传输到ADS7843即可,等待转换周期完成,检测到BUSY信号不再忙,即可以获得相应电压的数据。
此外PENIRQ一般需要一个上拉电阻,因为ADS7843是一个OC门输出结构,本系统中直接使用Atmega 128内部的上拉电阻。单片机中断系统中将INT0分配给触摸屏控制器,并且设定成低电平触发,这样可以检测按键时间,可以用按键长短处理不同的功能。
触摸屏控制器驱动程序
驱动程序的编写与硬件的设计是直接相关,驱动程序是以上面所设计的硬件为基础的。
表1 ADS7843的控制字及数据传输格式
根据ADS7843的Datasheet,ADS7843的控制字及数据传输格式如表1。其中S为数据传输起始标志位,该位必为“1”。A2~A0进行通道选择。MODE用来选择A/D转换的精度,“1”选择8位,“0”选择12位。SER/选择参考电压的输入模式。PD1、PD0选择省电模式:“00”省电模式允许,在两次A/D转换之间掉电,且中断允许;“01”同“00”,只是不允许中断;“10”保留;“11”禁止省电模式。
为了完成一次电极电压切换和A/D转换,需要先通过串口往ADS7843发送控制字,转换完成后再通过串口读出电压转换值。标准的一次转换需要24个时钟周期。由于串口支持双向同时进行传送,并且在一次读数与下一次发控制字之间可以重叠,所以转换速率可以提高到每次16个时钟周期。如果条件允许,CPU可以产生15个CLK的话(比如FPGA和ASIC),转换速率还可以提高到每次15个时钟周期。
所以我们选择控制字 :
0x94-----X+输入得到Y AD值 0xe4----Y+输入得到X AD值
SPI初始化程序:
void spi_init(void)
{
SPCR = 0x53; //setup SPI
SPSR = 0x00; //setup SPI
}
SPI主机传输函数:
void SPI_MasterTransmit(char cData)
{
SPDR = cData; /* 启动数据传输 */
while(!(SPSR & (1<<SPIF))); /*等待传输
结束*/
}
读取ADS7843的模拟量值;
unsigned int Get_Touch_Ad(unsigned char
channel)
{
unsigned int ad_tem;
SPI_MasterTransmit(channel);//发送控制字
if(PING&&0x08==0) ; //判断busy
delayms(1);
SPI_MasterTransmit(0);
delayms(1); //等待发送完毕
ad_tem=SPDR;
ad_tem=ad_tem<<8;
SPI_MasterTransmit(0); //启动spi传送
delayms(1); //等待发送完毕
ad_tem|=SPDR;
ad_tem=ad_tem>>4;
return(ad_tem); //返回的参数
}
不同的用户还需根据自己设计的系统,做一个简单的四点校正程序,这样可以获得一个精确度较高的触摸屏坐标体系。
触摸屏 电阻 电压 单片机 Atmel ADC 电路 看门狗 总线 FPGA 自动化 相关文章:
- 基于手写辨识芯片的汉字手写输入技术(11-03)
- ATmega16与触摸屏的连接(03-01)
- 基于ADS7846的电阻式触摸屏接口设计(10-12)
- 移动显示技术发展及在未来手持设备中应用(11-17)
- 基于I2C的嵌入式多点触摸屏幕驱动设计(03-01)
- 基于多功能触笔的PC触摸屏系统(03-26)