基于通道控制的双余度DSP设计与实现
时间:04-26
来源:互联网
点击:
引言
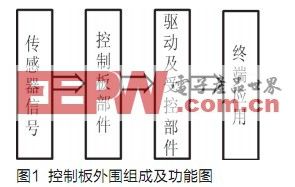
具有自动控制功能的电子设备已广泛应用于我国多型机上,用于飞机上各机载设备的控制、调节等功能。如图1所示,其控制系统主要由传感器信号输入、核心控制板及经过处理驱动后的控制信号输出,最后输出到机上的具体应用。本文将主要介绍如何利用通道复用技术设计实现具有双余度DSP的控制板部件,重点描述如何实现系统的双余度DSP设计、双DSP间如何通讯以及DSP的故障判定法则等。
控制板硬件设计
控制板的硬件框图如图2所示,主要由外部信息采集单元、双余度DSP模块、应用处理及其输出单元等组成。其中,双余度单元的CPU选用16位定点DSP TMS320LF2407A,其运行最高速率可达40MHz、片内集成多种外设。
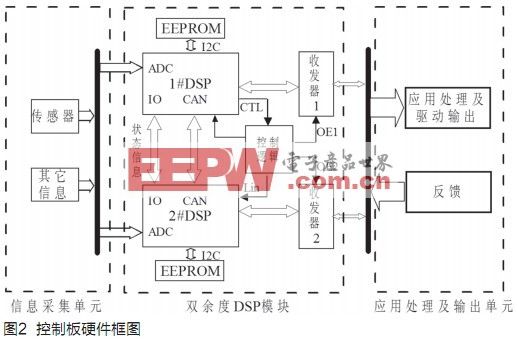
图中,两个DSP通过CAN 总线及I/O口进行控制信息交换及数据通信。两个DSP分别与收发器1、收发器2相连,这两个通道与外部数据或控制总线是相连的,即共享一个外部接口,通道控制逻辑使同一时刻只能有一个通道打开,保证系统工作的稳定性。其中DSP1是控制逻辑的主控制机,在正常工作的情况下由它控制着相应通道的通断及当前主控CPU。每个DSP都有自己的 EEPROM存储器,用于存储系统的各种即时信息,并通过CAN 总线在双机间进行传输。控制板工作时采集传感器及外部控制信息,通过CPU运算处理后由其对应的通道输出控制信息到相应控制盒,控制相应设备的动作。
双余度DSP模块硬件设计
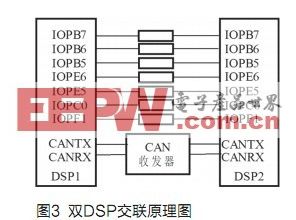
双余度DSP模块是本设计的重点,其硬件原理如图2的双余度DSP模块。它由双DSP核及通道控制逻辑两部分组成。其中DSP1为主CPU,DSP2为辅CPU。当系统上电启动后主CPU通过I/O口通知辅CPU进行自检并采集其自检信息,同时当主CPU的EEPROM内容发生改变时,主CPU通过CAN 总线发送相应的数据给辅CPU以更新辅CPU的EEPROM内容,如图3所示。图中CAN收发器为两个对连的CAN 总线收发器,负责实现双机间系统即时信息的传送,并存储于各自对应的EEPROM中,供维护和查询。
通道控制逻辑决定着整个系统的当前工作CPU,即当其中一个CPU被认为有故障时,通道控制逻辑将主动或是被动地切换到系统认为没有故障的CPU,或决定由其中的一个CPU强制工作。通道控制逻辑的硬件原理如图4所示。所谓的主动切换是指当主DSP通个自检发现自身有故障(包括其对应的通道故障),而其程序能正常工作的情况下,由其程序产生的通过控制I/O口的逻辑电平而产生的通道切换。被动切换是指非DSP自检的因素产生,而是由于通道控制逻辑本身硬件故障引起的通道意外切换。通道控制逻辑硬件由门电路组成,能有效地防止双机的抢权问题。同时控制逻辑返回给两个DSP一个 “CTL_BACK”状态回读信号,用于判断当前的通道情况。

主DSP通过控制输入端口的逻辑状态来使能相应的通道,只有当两个控制端同时有效时选通主通道,此时主DSP工作。其他任何状态都将打开辅通道。可以有效避免由于主控DSP I/O口失效而产生不能切换的后果。同时主DSP不断检测 “CTL_BACK”状态回读信号的状态,否则将产生被动切换,说明通道控制逻辑硬件故障。辅DSP上电后不断检测 “CTL_BACK”状态回读信号,若检测到为有效,则说明通道已经切换到了辅通道,辅DSP开始工作。
应用处理及其输出单元
针对于不同的应用其处理及输出单元具有各自的特殊性,本应用要求输出多路电压控制信号,主要由带SPI接口的16路模数转换芯片及驱动电路组成,并通过DSP的I/O口控制D /A的复位、清零等操作。
系统软件
系统软件设计主要基于CCS2.2 Code Composer Studio集成开发环境,主程序采用汇编语言编写,软件调试及仿真完成。控制板DSP软件流程框图如图 5所示,系统软件主要实现双机间的通讯及故障判别并切换,并完成控制任务处理。包括主DSP软件及辅DSP软件两部分,其中任务控制处理功能部分是相同的,重点在于双机间的交互问题。

在双机交互的切换问题中,起主要作用的是通道的切换,当前打开的通道具有最高优先权,不管产生DSP切换的原因是什么,其最终的结果都将是当前只有一个通道是打开的,通道的切换可能是由主DSP程序主动控制而切换,或是控制逻辑本身的硬件原因,但是只有这个对应的打开通道的DSP能真正控制外部的输出,这即所谓的通道分用。切换依据如图5所示。
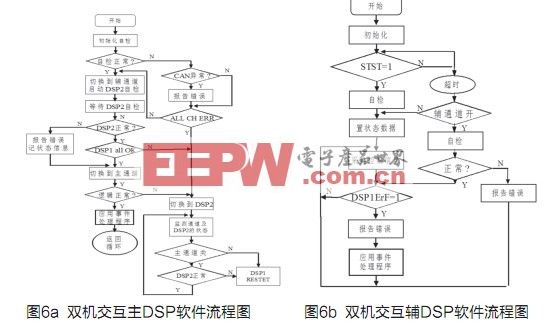
系统应用控制软件主要实现系统的具体的应用功能,主要由以下功能子程序组成:系统自检子程序、双机交互及故障判断切换子程序、控制应用功能子程序等。其中主DSP、辅DSP双机交互软件流程如图6a、图6b所示。
结语
双余度DSP系统在对控制器要求较高的场合具有很好的实用意义,其基于通道复用的硬件设计结构简单且易于实现,有效地解决了双机共同工作的权限问题。本设计中所提出的双余度DSP设计可以很方便地移植到其他的双余度系统中。
具有自动控制功能的电子设备已广泛应用于我国多型机上,用于飞机上各机载设备的控制、调节等功能。如图1所示,其控制系统主要由传感器信号输入、核心控制板及经过处理驱动后的控制信号输出,最后输出到机上的具体应用。本文将主要介绍如何利用通道复用技术设计实现具有双余度DSP的控制板部件,重点描述如何实现系统的双余度DSP设计、双DSP间如何通讯以及DSP的故障判定法则等。
控制板硬件设计
控制板的硬件框图如图2所示,主要由外部信息采集单元、双余度DSP模块、应用处理及其输出单元等组成。其中,双余度单元的CPU选用16位定点DSP TMS320LF2407A,其运行最高速率可达40MHz、片内集成多种外设。
图中,两个DSP通过CAN 总线及I/O口进行控制信息交换及数据通信。两个DSP分别与收发器1、收发器2相连,这两个通道与外部数据或控制总线是相连的,即共享一个外部接口,通道控制逻辑使同一时刻只能有一个通道打开,保证系统工作的稳定性。其中DSP1是控制逻辑的主控制机,在正常工作的情况下由它控制着相应通道的通断及当前主控CPU。每个DSP都有自己的 EEPROM存储器,用于存储系统的各种即时信息,并通过CAN 总线在双机间进行传输。控制板工作时采集传感器及外部控制信息,通过CPU运算处理后由其对应的通道输出控制信息到相应控制盒,控制相应设备的动作。
双余度DSP模块硬件设计
双余度DSP模块是本设计的重点,其硬件原理如图2的双余度DSP模块。它由双DSP核及通道控制逻辑两部分组成。其中DSP1为主CPU,DSP2为辅CPU。当系统上电启动后主CPU通过I/O口通知辅CPU进行自检并采集其自检信息,同时当主CPU的EEPROM内容发生改变时,主CPU通过CAN 总线发送相应的数据给辅CPU以更新辅CPU的EEPROM内容,如图3所示。图中CAN收发器为两个对连的CAN 总线收发器,负责实现双机间系统即时信息的传送,并存储于各自对应的EEPROM中,供维护和查询。
通道控制逻辑决定着整个系统的当前工作CPU,即当其中一个CPU被认为有故障时,通道控制逻辑将主动或是被动地切换到系统认为没有故障的CPU,或决定由其中的一个CPU强制工作。通道控制逻辑的硬件原理如图4所示。所谓的主动切换是指当主DSP通个自检发现自身有故障(包括其对应的通道故障),而其程序能正常工作的情况下,由其程序产生的通过控制I/O口的逻辑电平而产生的通道切换。被动切换是指非DSP自检的因素产生,而是由于通道控制逻辑本身硬件故障引起的通道意外切换。通道控制逻辑硬件由门电路组成,能有效地防止双机的抢权问题。同时控制逻辑返回给两个DSP一个 “CTL_BACK”状态回读信号,用于判断当前的通道情况。
主DSP通过控制输入端口的逻辑状态来使能相应的通道,只有当两个控制端同时有效时选通主通道,此时主DSP工作。其他任何状态都将打开辅通道。可以有效避免由于主控DSP I/O口失效而产生不能切换的后果。同时主DSP不断检测 “CTL_BACK”状态回读信号的状态,否则将产生被动切换,说明通道控制逻辑硬件故障。辅DSP上电后不断检测 “CTL_BACK”状态回读信号,若检测到为有效,则说明通道已经切换到了辅通道,辅DSP开始工作。
应用处理及其输出单元
针对于不同的应用其处理及输出单元具有各自的特殊性,本应用要求输出多路电压控制信号,主要由带SPI接口的16路模数转换芯片及驱动电路组成,并通过DSP的I/O口控制D /A的复位、清零等操作。
系统软件
系统软件设计主要基于CCS2.2 Code Composer Studio集成开发环境,主程序采用汇编语言编写,软件调试及仿真完成。控制板DSP软件流程框图如图 5所示,系统软件主要实现双机间的通讯及故障判别并切换,并完成控制任务处理。包括主DSP软件及辅DSP软件两部分,其中任务控制处理功能部分是相同的,重点在于双机间的交互问题。
在双机交互的切换问题中,起主要作用的是通道的切换,当前打开的通道具有最高优先权,不管产生DSP切换的原因是什么,其最终的结果都将是当前只有一个通道是打开的,通道的切换可能是由主DSP程序主动控制而切换,或是控制逻辑本身的硬件原因,但是只有这个对应的打开通道的DSP能真正控制外部的输出,这即所谓的通道分用。切换依据如图5所示。
系统应用控制软件主要实现系统的具体的应用功能,主要由以下功能子程序组成:系统自检子程序、双机交互及故障判断切换子程序、控制应用功能子程序等。其中主DSP、辅DSP双机交互软件流程如图6a、图6b所示。
结语
双余度DSP系统在对控制器要求较高的场合具有很好的实用意义,其基于通道复用的硬件设计结构简单且易于实现,有效地解决了双机共同工作的权限问题。本设计中所提出的双余度DSP设计可以很方便地移植到其他的双余度系统中。
电子 传感器 DSP 总线 收发器 电路 电压 仿真 相关文章:
- 利用蓝牙技术和远程信息控制单元实现汽车诊断(11-13)
- 六大特点助CMOS图像传感器席卷医疗电子应用(11-13)
- 汽车网络的分类及发展趋向(11-13)
- 多核嵌入式处理技术推动汽车技术发展(11-18)
- CAN总线的客车轻便换档系统设计与实现(02-13)
- 高性能嵌入式ARM MPU在医疗电子系统中的设计应用(05-12)