基于TMS320F2812的交流变频调速系统的设计
时间:10-26
来源:互联网
点击:
目前已有多种PWM 控制方式应用于交流变频调速系统,其中空间矢量PWM(SVPWM)以其特有的优越性能,在电机调速方面得到广泛应用。该种方法控制简单,数字化实现方便,可显著减小逆变器输出电流谐波成分及电机谐波损耗,降低脉动转矩,提高电压利用率。
本文主要介绍利用TMS320F2812(以下简称F2812)实现对变频调速系统的实时控制。
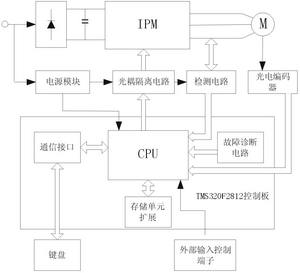
图1 变频调速系统结构图

图2 控制板逻辑框图
TMS320F2812主要特点
F2812运算速度快,工作时钟频率达150MHz,指令周期可以达到6.67ns 以内,低功耗(核心电压1.8V,I/O口电压3.3V)。
采用哈佛总线结构,具有强大的操作能力、迅速的中断响应和处理以及统一的寄存器编程模式。可以实现16×16位和32×32位乘累加操作和16×16位的两个乘累加操作。
片内存储器包括8K×16位的Flash存储器,1K×16位的OTP型只读存储器,两块4K×16位的单口随机存储器,一块8K×16位的单口随机存储器,两块1K×16位的单口随机存储器。外部存储器接口可实现多达1M存储器的扩展。外部扩展模块(PIE)可支持96个外部中断,45个可用。
两个增强的事件管理器模块(EVA、EVB),提供了一整套用于运动控制和电机控制应用的功能和特性。每个事件管理模块包括通用定时器(GP)、比较单元、捕获单元以及正交编码脉冲电路。
外围设备包括3个32位的CPU定时器,16通道12位ADC(单个转换时间为200ns,单路转换时间为60ns),它不仅具有串行外围接口(SPI)和两个串行通信接口(SCI),还有改进的局域网络(eCAN)、多通道缓冲串行接口(McBSP)和串行外围接口模式。
变频器空间电压矢量控制的基本原理
变频器的主电路通常是AC-DC-AC电力电子变换电路,DC-AC部分为三相桥逆变系统,确定其开关信号的控制策略往往决定了变频器性能的高低。
分析变频器三相逆变桥的开关状态(逆变桥上桥臂开通表示为1,相应的下桥臂关断):(000)、(001)、(010)、(100)、(101)、(110)、(111),可表示为8个基本空间电压矢量:V1V2V3V4V5V6V7,其中V0V7为零矢量,其余为有效工作矢量。空间矢量PWM控制就是通过分配电压空间矢量,尤其是零矢量的作用时间,最终形成等幅不等宽的PWM脉冲波,实现追踪磁通的圆形轨迹。若复平面上参考等效合成空间矢量V的模长等于相电压的峰值,以角频率按逆时针方向匀速旋转,那么其在三相轴上的投影就是对称的正弦量。反过来,按照平行四边形法则,利用这8个基本矢量可以合成任意角度和模长的等效合成矢量Vr。如果匀速发出在一个圆周里均匀分布的等效合成矢量,也就得到了三相正弦量的开关信号,这就是空间电压矢量调制。一个周期里发出的合成矢量越多,说明采样频率越高。
基于TMS320F2812的调速系统设计
系统结构如图1所示。系统由主电路、控制电路、驱动电路和辅助电路组成。
主电路为交直交变频电路,逆变器采用日本富士公司R系列7MBP100RA060型智能电力模块(IPM),它是一种包括制动单元在内的完整的逆变器,其中包括7个IGBT和7个快速功率二极管。6个IGBT与6个回馈二极管并联组成三相桥臂,1个IGBT是动力制动用的开关管。还集成了各种IGBT 的驱动电路以及异常情况的检测单元,如短路检测、过流检测、欠压检测、过温检测等。当上述的任一异常信号被检测到时,IPM模块的F0 信号可以通过光耦隔离后送到DSP 的功率驱动保护引脚(PDPINT) ,以实现相应的保护。
控制电路由F2812控制板以及键盘和外部控制端子组成。外部控制端子通过RS-485 接口与F2812通信,完成多种管理功能,如初始参数的设定,电流、频率状态的显示等。
变频主体部分以F2812芯片为核心,完成电压空间矢量控制核心算法、产生PWM波形、进行相关电压/电流的检测处理。F2812的事件管理模块中具有生成SVPWM 的硬件电路,如图2所示。
从硬件结构可以看出,PWM生成由特定的寄存器分别进行控制:ACTR (12~15)中是当前的主矢量,根据Vr的位置查转换模式表,写入相应的值;TICON(11"13)控制生成对称或不对称的PWM 波形;死区时间设置由DBTCON完成;COMCON(9)控制PWM输出或高阻态输出,可在系统出现故障时及时保护。3个比较寄存器CMXP1"3 分别对应何时开通U、V、W 三相,其值的大小由主辅矢量和零矢量的作用时间决定,当定时器的记数值等于CMXP13 的值时,就会改变空间矢量对应的控制信号的输出。
驱动电路主要是使控制输入信号通过光耦传送,设计时可选用TLP759、TLP559 等型号的光电耦合器,并使光耦与IPM 控制端子间的布线最短,布线阻抗最小。
用磁平衡式霍尔传感器(CT1、CT2) 检测输出的两相电流iA 、iB,采用F2812自带的A/ D 转换器,对A、B 两相定子电流进行采样,从而获得实时的定子电流信息。
速度反馈信号检测采用增量式光电编码器作为速度检测器件,它可以输出两个相位相差90°的方波脉冲信号,经施密特电路整形后,两路脉冲信号经光耦送入F2812的正交编码脉冲单元(QEP),由内部4 倍频后,通过通用定时器T3对脉冲进行计数,利用T/M法得到速度反馈值。
本文主要介绍利用TMS320F2812(以下简称F2812)实现对变频调速系统的实时控制。
图1 变频调速系统结构图
图2 控制板逻辑框图
TMS320F2812主要特点
F2812运算速度快,工作时钟频率达150MHz,指令周期可以达到6.67ns 以内,低功耗(核心电压1.8V,I/O口电压3.3V)。
采用哈佛总线结构,具有强大的操作能力、迅速的中断响应和处理以及统一的寄存器编程模式。可以实现16×16位和32×32位乘累加操作和16×16位的两个乘累加操作。
片内存储器包括8K×16位的Flash存储器,1K×16位的OTP型只读存储器,两块4K×16位的单口随机存储器,一块8K×16位的单口随机存储器,两块1K×16位的单口随机存储器。外部存储器接口可实现多达1M存储器的扩展。外部扩展模块(PIE)可支持96个外部中断,45个可用。
两个增强的事件管理器模块(EVA、EVB),提供了一整套用于运动控制和电机控制应用的功能和特性。每个事件管理模块包括通用定时器(GP)、比较单元、捕获单元以及正交编码脉冲电路。
外围设备包括3个32位的CPU定时器,16通道12位ADC(单个转换时间为200ns,单路转换时间为60ns),它不仅具有串行外围接口(SPI)和两个串行通信接口(SCI),还有改进的局域网络(eCAN)、多通道缓冲串行接口(McBSP)和串行外围接口模式。
变频器空间电压矢量控制的基本原理
变频器的主电路通常是AC-DC-AC电力电子变换电路,DC-AC部分为三相桥逆变系统,确定其开关信号的控制策略往往决定了变频器性能的高低。
分析变频器三相逆变桥的开关状态(逆变桥上桥臂开通表示为1,相应的下桥臂关断):(000)、(001)、(010)、(100)、(101)、(110)、(111),可表示为8个基本空间电压矢量:V1V2V3V4V5V6V7,其中V0V7为零矢量,其余为有效工作矢量。空间矢量PWM控制就是通过分配电压空间矢量,尤其是零矢量的作用时间,最终形成等幅不等宽的PWM脉冲波,实现追踪磁通的圆形轨迹。若复平面上参考等效合成空间矢量V的模长等于相电压的峰值,以角频率按逆时针方向匀速旋转,那么其在三相轴上的投影就是对称的正弦量。反过来,按照平行四边形法则,利用这8个基本矢量可以合成任意角度和模长的等效合成矢量Vr。如果匀速发出在一个圆周里均匀分布的等效合成矢量,也就得到了三相正弦量的开关信号,这就是空间电压矢量调制。一个周期里发出的合成矢量越多,说明采样频率越高。
基于TMS320F2812的调速系统设计
系统结构如图1所示。系统由主电路、控制电路、驱动电路和辅助电路组成。
主电路为交直交变频电路,逆变器采用日本富士公司R系列7MBP100RA060型智能电力模块(IPM),它是一种包括制动单元在内的完整的逆变器,其中包括7个IGBT和7个快速功率二极管。6个IGBT与6个回馈二极管并联组成三相桥臂,1个IGBT是动力制动用的开关管。还集成了各种IGBT 的驱动电路以及异常情况的检测单元,如短路检测、过流检测、欠压检测、过温检测等。当上述的任一异常信号被检测到时,IPM模块的F0 信号可以通过光耦隔离后送到DSP 的功率驱动保护引脚(PDPINT) ,以实现相应的保护。
控制电路由F2812控制板以及键盘和外部控制端子组成。外部控制端子通过RS-485 接口与F2812通信,完成多种管理功能,如初始参数的设定,电流、频率状态的显示等。
变频主体部分以F2812芯片为核心,完成电压空间矢量控制核心算法、产生PWM波形、进行相关电压/电流的检测处理。F2812的事件管理模块中具有生成SVPWM 的硬件电路,如图2所示。
从硬件结构可以看出,PWM生成由特定的寄存器分别进行控制:ACTR (12~15)中是当前的主矢量,根据Vr的位置查转换模式表,写入相应的值;TICON(11"13)控制生成对称或不对称的PWM 波形;死区时间设置由DBTCON完成;COMCON(9)控制PWM输出或高阻态输出,可在系统出现故障时及时保护。3个比较寄存器CMXP1"3 分别对应何时开通U、V、W 三相,其值的大小由主辅矢量和零矢量的作用时间决定,当定时器的记数值等于CMXP13 的值时,就会改变空间矢量对应的控制信号的输出。
驱动电路主要是使控制输入信号通过光耦传送,设计时可选用TLP759、TLP559 等型号的光电耦合器,并使光耦与IPM 控制端子间的布线最短,布线阻抗最小。
用磁平衡式霍尔传感器(CT1、CT2) 检测输出的两相电流iA 、iB,采用F2812自带的A/ D 转换器,对A、B 两相定子电流进行采样,从而获得实时的定子电流信息。
速度反馈信号检测采用增量式光电编码器作为速度检测器件,它可以输出两个相位相差90°的方波脉冲信号,经施密特电路整形后,两路脉冲信号经光耦送入F2812的正交编码脉冲单元(QEP),由内部4 倍频后,通过通用定时器T3对脉冲进行计数,利用T/M法得到速度反馈值。
PWM 逆变器 电流 电压 总线 电路 ADC 电力电子 IGBT 二极管 DSP 传感器 编码器 相关文章:
- CMOS求和比较器在PWM开关电源控制中的应用(11-27)
- 改善 PWM 电源控制器低负载运行的缓冲放大器和 LED(01-16)
- 负输出罗氏变换器实用性剖析(01-09)
- 一种新型ZCS-PWM Buck变换器研究(02-20)
- PWM技术实现方法综述(02-19)
- 基于HPWM技术的大功率正弦超声波逆变电源(02-26)