LEM传感器在交错Boost型PFC电路中的应用
时间:07-20
来源:互联网
点击:
0 引言
由于液压伺服系统的固有特性(如死区、泄漏、阻尼系数的时变性以及负载干扰的存在),系统往往会呈现典型的不确定性和非线性特性。这类系统一般很难精确描述控制对象的传递函数或状态方程,而常规的PID控制又难以取得良好的控制效果。另外,单一的模糊控制虽不需要精确的数学模型,但是却极易在平衡点附近产生小振幅振荡,从而使整个控制系统不能拥有良好的动态品质。
本文针对这两种控制的优缺点并结合模糊控制技术,探讨了液压伺服系统的模糊自整定PID控制方法,同时利用MATLAB软件提供的Simulink和Fuzzy工具箱对液压伺服调节系统的模糊自整定PID控制系统进行仿真,并与常规PID控制进行了比较。此外,本文还尝试将控制系统通过单片机的数字化处理,并在电液伺服实验台上进行了测试,测试证明:该方法能使系统的结构简单化,操作灵活化,并可增强可靠性和适应性,提高控制精度和鲁棒性,特别容易实现非线性化控制。
1 模糊PID自整定控制器的设计
本控制系统主要完成数据采集、速度显示和速度控制等功能。其中智能模糊控制由单片机完成,并采用规则自整定PID控制算法进行过程控制。整个系统的核心是模糊控制器,AT89C51单片机是控制器的主体模块。电液伺服系统输出的速度信号经传感器和A/D转换之后进入单片机,单片机则根据输入的各种命令,并通过模糊控制算法计算控制量,然后将输出信号通过D/A转换送给液压伺服系统,从而控制系统的速度。该模糊控制器的硬件框图如图1所示。
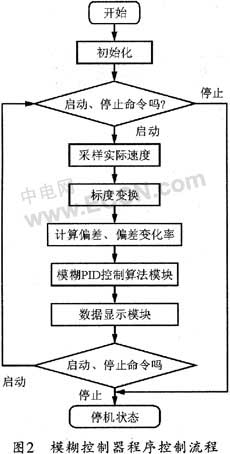
模糊控制器的主程序包括初始化、键盘管理及控制模块和显示模块的调用等。温度信号的采集、标度变换、控制算法以及速度显示等功能的实现可由各子程序完成。软件的主要流程是:利用AT89C51单片机调A/D转换、标度转换模块以得到速度的反馈信号,然后根据偏差和偏差的变化率计算输入量,再由模糊PID自整定控制算法得出输出控制量。启动、停止可通过键盘并利用外部中断产生,有按键输入则调用中断服务程序。该程序的流程图如图2所示。
2 模糊控制器算法研究
采用模糊PID自整定控制的目的是使控制器能够根据实际情况调整比例系数Kp、积分系数Ki和微分系数Kd,以达到调节作用的实时最优。该电液伺服系统的Fuzzy自整定PID控制系统结构如图3所示。
为了简化运算和满足实时性要求,即该调节系统的基本控制仍为PID控制,但使PID调节参数由模糊自整定控制器根据偏差e和偏差变化率ec进行自动调整,同时把模糊自整定控制器的模糊部分按Kp、Ki和Kd分成3部分,分别由相应的子推理器来实现。
2.1 输入值的模糊化
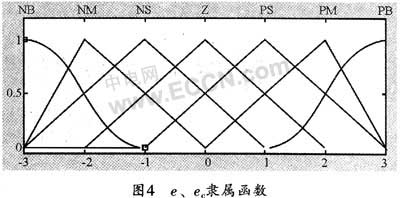
模糊自整定PID控制器是在fuzzy集的论域中进行讨论和计算的,因而首先要将输入变量变换到相应的论域,并将输人数据转换成合适的语言值,也就是要对输入量进行模糊化。结合本液压伺服系统的特性,这里选择模糊变量的模糊集隶属函数为正态分布,具体分布如图4所示。根据该规则可把实际误差e、误差变化率ec(de/dt)对应的语言变量E、EC表示成模糊量。E、EC的基本论域为[-6,+6],将其离散成13个等级即[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6]。考虑到控制的精度要求,本设计将[-6,+6]分为负大[NB]、负中[NM]、负小[NS]、零[ZO]、正小[PS]、正中[PM]、正大[PB]等7个语言变量,然后由e、ec隶属函数根据最大值法得出相应的模糊变量。
2.2 模糊控制规则表的建立
(1) Kp控制规则设计
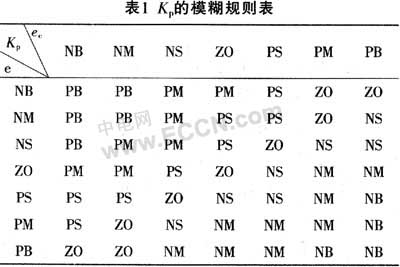
在PID控制器中,Kp值的选取决定于系统的响应速度。增大Kp能提高响应速度,减小稳态误差;但是,Kp值过大会产生较大的超调,甚至使系统不稳定减小Kp可以减小超调,提高稳定性,但Kp过小会减慢响应速度,延长调节时间。因此,调节初期应适当取较大的Kp值以提高响应速度,而在调节中期,Kp则取较小值,以使系统具有较小的超调并保证一定的响应速度;而在调节过程后期再将Kp值调到较大值来减小静差,提高控制精度。Kp的控制规则如表1所列。
(2) Ki控制规则设计
在系统控制中,积分控制主要是用来消除系统的稳态误差。由于某些原因(如饱和非线性等),积分过程有可能在调节过程的初期产生积分饱和,从而引起调节过程的较大超调。因此,在调节过程的初期,为防止积分饱和,其积分作用应当弱一些,甚至可以取零;而在调节中期,为了避免影响稳定性,其积分作用应该比较适中;最后在过程的后期,则应增强积分作用,以减小调节静差。依据以上分析,制定的Ki控制规则表如表2所列。
(3) Kd控制规则设计
微分环节的调整主要是针对大惯性过程引入的,微分环节系数的作用在于改变系统的动态特性。系统的微分环节系数能反映信号变化的趋势,并能在偏差信号变化太大之前,在系统中引入一个有效的早期修正信号,从而加快响应速度,减少调整时间,消除振荡.最终改变系统的动态性能。因此,Kd值的选取对调节动态特性影响很大。Kd值过大,调节过程制动就会超前,致使调节时间过长;Kd值过小,调节过程制动就会落后,从而导致超调增加。根据实际过程经验,在调节初期,应加大微分作用,这样可得到较小甚至避免超调;而在中期,由于调节特性对Kd值的变化比较敏感,因此,Kd值应适当小一些并应保持固定不变;然后在调节后期,Kd值应减小,以减小被控过程的制动作用,进而补偿在调节过程初期由于Kd值较大所造成的调节过程的时间延长。依据以上分析,制定的Kd控制规则表如表3所列。
由于液压伺服系统的固有特性(如死区、泄漏、阻尼系数的时变性以及负载干扰的存在),系统往往会呈现典型的不确定性和非线性特性。这类系统一般很难精确描述控制对象的传递函数或状态方程,而常规的PID控制又难以取得良好的控制效果。另外,单一的模糊控制虽不需要精确的数学模型,但是却极易在平衡点附近产生小振幅振荡,从而使整个控制系统不能拥有良好的动态品质。
本文针对这两种控制的优缺点并结合模糊控制技术,探讨了液压伺服系统的模糊自整定PID控制方法,同时利用MATLAB软件提供的Simulink和Fuzzy工具箱对液压伺服调节系统的模糊自整定PID控制系统进行仿真,并与常规PID控制进行了比较。此外,本文还尝试将控制系统通过单片机的数字化处理,并在电液伺服实验台上进行了测试,测试证明:该方法能使系统的结构简单化,操作灵活化,并可增强可靠性和适应性,提高控制精度和鲁棒性,特别容易实现非线性化控制。
1 模糊PID自整定控制器的设计
本控制系统主要完成数据采集、速度显示和速度控制等功能。其中智能模糊控制由单片机完成,并采用规则自整定PID控制算法进行过程控制。整个系统的核心是模糊控制器,AT89C51单片机是控制器的主体模块。电液伺服系统输出的速度信号经传感器和A/D转换之后进入单片机,单片机则根据输入的各种命令,并通过模糊控制算法计算控制量,然后将输出信号通过D/A转换送给液压伺服系统,从而控制系统的速度。该模糊控制器的硬件框图如图1所示。

模糊控制器的主程序包括初始化、键盘管理及控制模块和显示模块的调用等。温度信号的采集、标度变换、控制算法以及速度显示等功能的实现可由各子程序完成。软件的主要流程是:利用AT89C51单片机调A/D转换、标度转换模块以得到速度的反馈信号,然后根据偏差和偏差的变化率计算输入量,再由模糊PID自整定控制算法得出输出控制量。启动、停止可通过键盘并利用外部中断产生,有按键输入则调用中断服务程序。该程序的流程图如图2所示。
2 模糊控制器算法研究
采用模糊PID自整定控制的目的是使控制器能够根据实际情况调整比例系数Kp、积分系数Ki和微分系数Kd,以达到调节作用的实时最优。该电液伺服系统的Fuzzy自整定PID控制系统结构如图3所示。
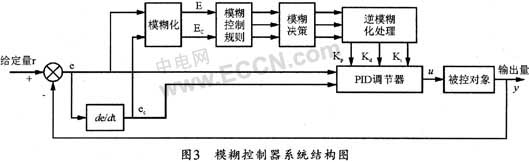
为了简化运算和满足实时性要求,即该调节系统的基本控制仍为PID控制,但使PID调节参数由模糊自整定控制器根据偏差e和偏差变化率ec进行自动调整,同时把模糊自整定控制器的模糊部分按Kp、Ki和Kd分成3部分,分别由相应的子推理器来实现。
2.1 输入值的模糊化
模糊自整定PID控制器是在fuzzy集的论域中进行讨论和计算的,因而首先要将输入变量变换到相应的论域,并将输人数据转换成合适的语言值,也就是要对输入量进行模糊化。结合本液压伺服系统的特性,这里选择模糊变量的模糊集隶属函数为正态分布,具体分布如图4所示。根据该规则可把实际误差e、误差变化率ec(de/dt)对应的语言变量E、EC表示成模糊量。E、EC的基本论域为[-6,+6],将其离散成13个等级即[-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6]。考虑到控制的精度要求,本设计将[-6,+6]分为负大[NB]、负中[NM]、负小[NS]、零[ZO]、正小[PS]、正中[PM]、正大[PB]等7个语言变量,然后由e、ec隶属函数根据最大值法得出相应的模糊变量。
2.2 模糊控制规则表的建立
(1) Kp控制规则设计
在PID控制器中,Kp值的选取决定于系统的响应速度。增大Kp能提高响应速度,减小稳态误差;但是,Kp值过大会产生较大的超调,甚至使系统不稳定减小Kp可以减小超调,提高稳定性,但Kp过小会减慢响应速度,延长调节时间。因此,调节初期应适当取较大的Kp值以提高响应速度,而在调节中期,Kp则取较小值,以使系统具有较小的超调并保证一定的响应速度;而在调节过程后期再将Kp值调到较大值来减小静差,提高控制精度。Kp的控制规则如表1所列。
(2) Ki控制规则设计
在系统控制中,积分控制主要是用来消除系统的稳态误差。由于某些原因(如饱和非线性等),积分过程有可能在调节过程的初期产生积分饱和,从而引起调节过程的较大超调。因此,在调节过程的初期,为防止积分饱和,其积分作用应当弱一些,甚至可以取零;而在调节中期,为了避免影响稳定性,其积分作用应该比较适中;最后在过程的后期,则应增强积分作用,以减小调节静差。依据以上分析,制定的Ki控制规则表如表2所列。

(3) Kd控制规则设计
微分环节的调整主要是针对大惯性过程引入的,微分环节系数的作用在于改变系统的动态特性。系统的微分环节系数能反映信号变化的趋势,并能在偏差信号变化太大之前,在系统中引入一个有效的早期修正信号,从而加快响应速度,减少调整时间,消除振荡.最终改变系统的动态性能。因此,Kd值的选取对调节动态特性影响很大。Kd值过大,调节过程制动就会超前,致使调节时间过长;Kd值过小,调节过程制动就会落后,从而导致超调增加。根据实际过程经验,在调节初期,应加大微分作用,这样可得到较小甚至避免超调;而在中期,由于调节特性对Kd值的变化比较敏感,因此,Kd值应适当小一些并应保持固定不变;然后在调节后期,Kd值应减小,以减小被控过程的制动作用,进而补偿在调节过程初期由于Kd值较大所造成的调节过程的时间延长。依据以上分析,制定的Kd控制规则表如表3所列。
- 电源完整性与地弹噪声的高速PCB仿真(05-23)
- 并联混合滤波器中连接电感的仿真研究(10-30)
- 接口电路仿真的算法分析及实现(01-26)
- 集成电路测试仪电源电路的仿真设计研究与应用(10-21)
- 基于PWM控制的开关电源系统仿真研究(10-21)
- 基于UC3854A控制的PFC中分岔现象仿真研究(02-18)