一种低成本城市停车诱导系统中区域性Zigbee网络的设计
时间:11-11
来源:互联网
点击:
4 区域性Zigbee网络的软件设计
协调器结点中LPC11C14的主程序流程图如图3所示。上电后首先完成初始化。若接收到CC2530发送的车位状态变化信息,给CC2530发送反馈,随即更新数据库。若接收到停车请求,则根据数据库中的车位当前状态,判断有无空闲车位。若有空闲车位,运行停车位寻优算法,确定最优停车位。之后,通过GPRS模块向用户反馈结果。
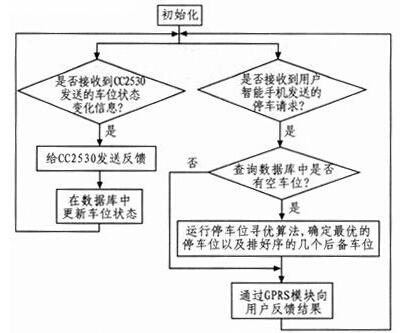
图3 LPC11C14的主程序流程图
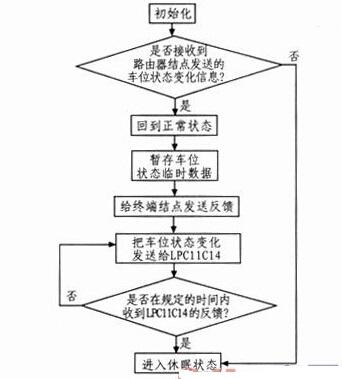
图4 协调器CC2530的主程序流程图
协调器结点中CC2530的主程序流程图如图4所示。初始化后,首先判断是否收到车位状态变化消息。若未收到,进入休眠状态;若收到,则从休眠状态回到正常状态。接下来,为防止车位状态存储到数据库前丢失,需在CC2530内部的Flash存储器中临时存放。之后,通过路由器结点给终端结点发送反馈。最后,把车位变化信息发送给LPC11C14并等待反馈。若在规定的时间内没有收到反馈,则重发;若收到反馈,则进入休眠状态。
终端结点的主程序流程图如图5所示。初始化后对车位检测传感器进行数据采集,得到的数据经过CC2530自带的A/D模块进行AD转换,然后以循环覆盖的方式存入CC3530内部的FLASH.之后,判断当前状态与上一个状态是否相同。若车位状态发生变化,由Zigbee射频模块通过路由器结点向协调器结点发送数据,并等待协调器结点的反馈。若在规定的时间内没有收协调器结点的反馈,则重发数据;若收到反馈,则开启定时中断后进入休眠状态。接下来等待定时中断唤醒,进行下一次的数据采集。
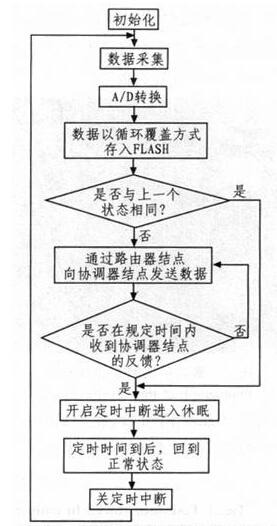
图5 终端结点的主程序流程图
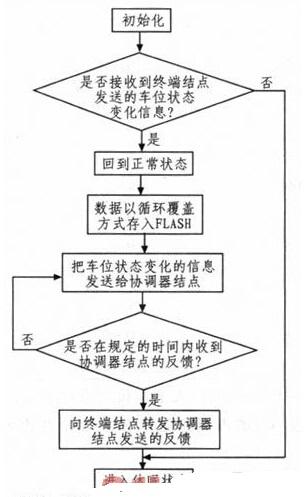
图6 路由器结点的主程序流程图
路由器结点的主程序流程图如图6所示,若接收到终端结点发送的车位状态变化信息,则产生外部中断,从休眠状态回到正常状态。然后以循环覆盖的方式存入CC3530内部的FLASH.接着将车位状态变化的信息发送给协调器结点,并等待协调器结点的反馈。若在规定的时间内没有收到反馈,则进行重发;否则,向终端结点转发协调器结点发送的反馈,之后进入休眠状态,等待外部中断唤醒。
5 实物展示及模拟运行结果
图7为所开发出的测试系统的实物展示图。在图7的中上部,左边是协调器结点的LPC11C14板,右边是协调器结点的CC2530板。在LPC11 C14板中,左边带有天线的部分是商品化的GPRS模块。在CC2530板中,中上部带有天线的部分是商品化的Zigbee射频模块。由于这两部分的频率均处于微波频段,因此为保证可靠性采用商品化的成熟模块。在图7的中下部,左边是路由器结点,右边是终端结点。为保证测试效果,这两个结点在测试时均采用的是商品化的Zigbee模块,测试通过后可将底板替换为自己开发的底板(即:目前协调器结点中CC2530板所用的底板)。
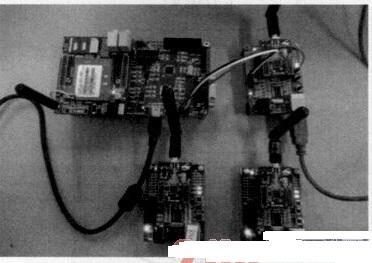
图7 测试系统的实物展示图
为测试区域性Zigbee网络软、硬件设计的有效性,事先在LPC11C14板的嵌入式数据库中存入如表1所示的测试数据。之后,利用手机发送短信向LPC11C14板的GPRS模块提出停车请求。接下来,LPC11C14运行停车位寻优算法。根据表1中的数据,经计算后得出结论:005号车位最佳。然后,LPC11C14的GPRS模块向手机回复短信。短信的发送和接收界面如图8所示。根据计时结果,从触发短信发送按钮到收到反馈的时间不超过10秒。
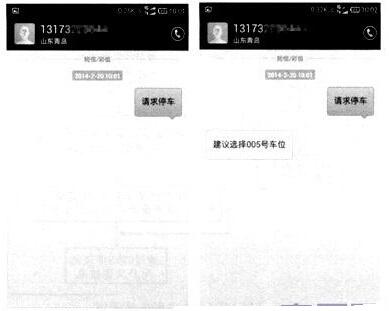
图8 手机发送和接收短信的显示界面
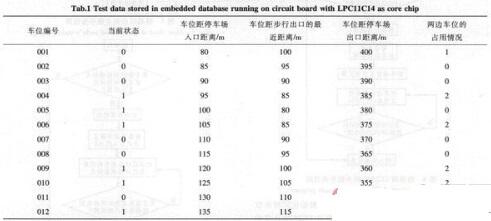
注:1)当前状态为0时,表示车位为占用状态;当前状态为1时,表示车位空闲。2)两边车位的占用情况为0时,表示两边车位均未被占用;为1时,表示有一边被占用;为2时,表示两边均被占用。
6结论
以嵌入式芯片LPC11C14和Zigbee通信芯片CC2530为主要部件,设计了一套用于停车诱导的区域性Zigbee网络的硬件电路,同时开发了协调器、路由器和终端三类节点的控制和通信程序。测试实验表明,所设计的Zigbee网络可准确接收用户的停车请求,并能及时反馈最佳车位信息,从用户请求到收到反馈的时间不超过10 s.
协调器结点中LPC11C14的主程序流程图如图3所示。上电后首先完成初始化。若接收到CC2530发送的车位状态变化信息,给CC2530发送反馈,随即更新数据库。若接收到停车请求,则根据数据库中的车位当前状态,判断有无空闲车位。若有空闲车位,运行停车位寻优算法,确定最优停车位。之后,通过GPRS模块向用户反馈结果。
图3 LPC11C14的主程序流程图
图4 协调器CC2530的主程序流程图
协调器结点中CC2530的主程序流程图如图4所示。初始化后,首先判断是否收到车位状态变化消息。若未收到,进入休眠状态;若收到,则从休眠状态回到正常状态。接下来,为防止车位状态存储到数据库前丢失,需在CC2530内部的Flash存储器中临时存放。之后,通过路由器结点给终端结点发送反馈。最后,把车位变化信息发送给LPC11C14并等待反馈。若在规定的时间内没有收到反馈,则重发;若收到反馈,则进入休眠状态。
终端结点的主程序流程图如图5所示。初始化后对车位检测传感器进行数据采集,得到的数据经过CC2530自带的A/D模块进行AD转换,然后以循环覆盖的方式存入CC3530内部的FLASH.之后,判断当前状态与上一个状态是否相同。若车位状态发生变化,由Zigbee射频模块通过路由器结点向协调器结点发送数据,并等待协调器结点的反馈。若在规定的时间内没有收协调器结点的反馈,则重发数据;若收到反馈,则开启定时中断后进入休眠状态。接下来等待定时中断唤醒,进行下一次的数据采集。
图5 终端结点的主程序流程图
图6 路由器结点的主程序流程图
路由器结点的主程序流程图如图6所示,若接收到终端结点发送的车位状态变化信息,则产生外部中断,从休眠状态回到正常状态。然后以循环覆盖的方式存入CC3530内部的FLASH.接着将车位状态变化的信息发送给协调器结点,并等待协调器结点的反馈。若在规定的时间内没有收到反馈,则进行重发;否则,向终端结点转发协调器结点发送的反馈,之后进入休眠状态,等待外部中断唤醒。
5 实物展示及模拟运行结果
图7为所开发出的测试系统的实物展示图。在图7的中上部,左边是协调器结点的LPC11C14板,右边是协调器结点的CC2530板。在LPC11 C14板中,左边带有天线的部分是商品化的GPRS模块。在CC2530板中,中上部带有天线的部分是商品化的Zigbee射频模块。由于这两部分的频率均处于微波频段,因此为保证可靠性采用商品化的成熟模块。在图7的中下部,左边是路由器结点,右边是终端结点。为保证测试效果,这两个结点在测试时均采用的是商品化的Zigbee模块,测试通过后可将底板替换为自己开发的底板(即:目前协调器结点中CC2530板所用的底板)。
图7 测试系统的实物展示图
为测试区域性Zigbee网络软、硬件设计的有效性,事先在LPC11C14板的嵌入式数据库中存入如表1所示的测试数据。之后,利用手机发送短信向LPC11C14板的GPRS模块提出停车请求。接下来,LPC11C14运行停车位寻优算法。根据表1中的数据,经计算后得出结论:005号车位最佳。然后,LPC11C14的GPRS模块向手机回复短信。短信的发送和接收界面如图8所示。根据计时结果,从触发短信发送按钮到收到反馈的时间不超过10秒。
图8 手机发送和接收短信的显示界面
注:1)当前状态为0时,表示车位为占用状态;当前状态为1时,表示车位空闲。2)两边车位的占用情况为0时,表示两边车位均未被占用;为1时,表示有一边被占用;为2时,表示两边均被占用。
6结论
以嵌入式芯片LPC11C14和Zigbee通信芯片CC2530为主要部件,设计了一套用于停车诱导的区域性Zigbee网络的硬件电路,同时开发了协调器、路由器和终端三类节点的控制和通信程序。测试实验表明,所设计的Zigbee网络可准确接收用户的停车请求,并能及时反馈最佳车位信息,从用户请求到收到反馈的时间不超过10 s.
ZigBee 传感器 嵌入式 恩智浦 Cortex ADC 射频 收发器 MCU 电路 相关文章:
- 四种短距离无线监控解决方案的性能对比(09-16)
- 基于MCF5213及Zigbee无线(09-12)
- 面向低速率应用的全球标准ZigBee (上)(09-27)
- 面向低速率应用的全球标准ZigBee (下)(09-27)
- Wibree:一个可供选择的新无线联网技术(11-07)
- 基于ZigBee技术的家居智能无线网络系统(01-11)