LPC2294 CAN总线主节点设计方案
时间:02-23
来源:互联网
点击:
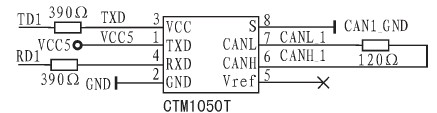
图8 CAN收发器电路图
2.5 以太网电路主节点采用RTL8019AS作为以太网控制器。RTL8019AS是一种全双工即插即用的以太网控制器,已集成了RTL8019内核和一个16 kB的SDR AM存储器。它兼容RTL8019控制软件和NE2000 8 bit或16 bit的传输。网络接口采用带网络变压器的HR901170A.RTL8019AS使用的片选线为nCS3,地址范围为0x8300 0000-0x83FF FFFF,由于只有256 B的寄存器,因此可操作地址范围为0x8300 0000-0x8300 00FF.RTL8019AS使用20M晶振。
3 软件设计
3.1 U-Boot移植
U-Boot(Universal Boot Loader)是遵循GPL条款的开放源码项目。从FADSROM、8xxROM、PPCBOOT逐步发展演化而来,支持多种嵌入式操作系统内核与微处理器系列。U-Boot的启动过程:初始化目标板硬件。给嵌入式操作系统提供板上硬件资源信息,加载、引导嵌入式操作系统。主节点使用U-Boot-2009-01,它不仅支持ARM-720T内核,而且间接提供了对LPC2294的板级支持。U-Boot的移植过程:首先通过修改star t.s文件设定系统主频:然后针对U-Boot所支持的LPC2292硬件资源配置信息作必要的修改,如外部存储器控制器(EMC)、以太网控制器等的硬件连接信息;接下来修改串口驱动代码使之与系统主频匹配;最后通过配置菜单配置U-Boot,主要配置所需要的命令和所要支持的硬件。
3.2 μCLinux移植
LPC2294没有MMU单元,不能运行定制的Linux,只能使用μCLinux.主节点移植的μCLinux版本号为2.6.25.从该版本开始,μCLinux支持CAN总线驱动。移植过程如下:
1)打Philips公司针对该芯片提供的官方补丁;
2)修改NANDFLASH部分的驱动程序;
3)配置μCLinux内核;
4)交叉编译内核。
所需源码及补丁文件如表2所示。
表2 所需源码及补丁文件

1)修改arch/arm/math-lpc22xx/head.s因为μCLinux假设运行前已由BootLoader完成基本硬件初始化工作,因此不再进行系统时钟频率、串口初始化等基本硬件的初始化。在head.s文件中包括初始化存储器控制器、系统分频器PLL等部分代码,需要更改这部分代码,使之与U-Boot中Lowlevel_init.s文件的描述一致。另外μCLinux运行前必须由BootLoader将其内核装入内存偏移量为0x80000000的地方,因此要保证在μCLinux源码中的对应设置与启动引导程序的初始化设置相同。
2)修改NANDFLASH驱动代码
μCLinux内核从2.6.14开始更改了NANDFLASH的驱动代码,使驱动更加智能化,不再需要写读写函数,只需要实现读写时序函数。时序函数只关心如何来发送指令到NANDFLASH,例如写指令周期需要对ALE线使能,那么μCLinux下的读写函数会给这个时序函数发送一段指令中包含使能ALE线的指令,然后将数据写到数据总线上,CLE的实现与之相类似。
3.3 CAN控制器驱动设计
对于微处理器来说,CAN控制器完全是基于事件触发的,即CAN控制器会在本身状态发生改变时,会将状态变化的结果告诉微处理器。所以微处理器处理CAN控制器时,可以采用中断的方式,也可以采用轮询查看CAN控制器状态的方式来对CAN控制器做出相应的处理。在μCLinux下CAN驱动程序设计包括初始化函数、读函数、写函数、中断服务函数等设计,使用文件指针注册设备,用户程序则通过对设备文件的操作来收发CAN总线数据。CAN驱动程序主要功能包括:
1)CAN控制器的初始化CAN控制器的初始化工作包括硬件使能CAN、设置管脚连接、软件复位、设置CAN报警界限、设置总线波特率、设置中断工作方式、设置CAN验收过滤器的工作方式以及启动等。
2)CAN总线数据发送先将数据送到发送缓冲区,然后对发送寄存器赋值以启动发送。CAN控制器只负责发送,并不保证发送成功。因此要知道是否发送成功,须查询TCS状态位,或配合发送成功中断来判断。
3)CAN总线数据接收CAN总线数据接收通过读取状态寄存器查询当前缓冲区中是否有数据,当有数据时将数据读出并放到CAN接收环形数据存储区中,当用户程序需要数据时则从该缓存区中读出。
4)CAN中断处理 通过中断获知CAN控制器的当前状态,然后做出相应的处理,包括接收中断处理、发送中断处理以及异常中断处理。中断处理由中断服务函数实现。
4 结论
本文提出一种基于LPC2294微控制器,使用μCLinux作为操作系统的CAN主节点软硬件设计方案。主节点通过扩展SRAM、FLASH提高了系统的性能,采用带隔离功能的CAN收发器增强了CAN总线节点的抗干扰能力,外接以太网控制器实现了计算机远程监控。基于μCLinux的软件系统既提高了系统的稳定性、应用软件的开发效率,又使得众多的Linux平台软件可容易地移植到主节点,增强系统的功能。通过制作了样机并进行实验,验证了这一方案的有效性。
来源:电子工程网
ARM 总线 CAN总线 收发器 EMC USB Linux 嵌入式 电阻 电路 电路图 CMOS 变压器 PCB 电子 相关文章:
- 基于GPRS网络的GPS图形导航仪 (01-05)
- 基于ARM9内核Processor对外部NAND FLASH的控制实现(07-12)
- 基于ARM的局域网IP电话设计(05-11)
- Actel和ARM联合开发专为FPGA应用而优化的高性能32位处理器(02-26)
- 基于ARM的定时继电器驱动模板的设计(08-04)
- 基于ARM平台的GPRS CQT测试系统的设计(08-10)