基于CAN总线智能建筑监控系统的通信协议设计
时间:12-08
来源:互联网
点击:
现代智能建筑监控系统广泛采用了现场总线技术。现场总线的种类目前有40多种,但适合智能建筑且在我国推广的主要有两种:CAN(Control Area Network)总线和Lonworks总线。CAN总线技术以其可靠性高,结构简单,传输距离长和成本低而具有巨大的应用潜力。
控制局域网CAN是现场总线技术中最成熟、最有发展前途的微处理器局域网络。协议采用总线型拓扑结构,通过研究CAN2.0B协议规范,制定了符合智能建筑监控系统的通信协议,并进行了通信节点软件的设计。
1 基于CAN总线的智能建筑网络拓扑结构
CAN总线的智能建筑监控系统拓扑结构,如图1所示。该系统由3部分组成:上位机、CAN通信节点和各个现场智能设备组成。通信节点的数量可根据建筑物的规模增减,CAN总线作为通信网络将各个节点连接成一个分布式智能监控系统。

(1)上位机:由计算机和监控软件组成,对整个智能建筑监控系统的管理和控制,是整个系统的中心。
(2)CAN通信节点:各通信节点功能相同,主要完成把现场设备采集到的实时数据发送到CAN总线上,接收CAN总线发送来的控制信息。CAN通信节点的硬件由微处理器、CAN控制器SJAl000、CAN收发器PCA82C250组成。
(3)现场智能设备:由微处理器、和现场功能装置等组成。完成检测、报警、控制、显示等功能。智能建筑监控系统现场设备由照明、空调、电梯、安全监控、消防监控、给排水,配电等组成。
2 CAN总线通信协议的硬件基础
CAN总线协议描述了信息在设备之间的传递规则,它对层的定义与开放系统互连模型OSI一致,CAN被分为应用层、数据链路层和物理层3层,各层之间互相透明,每一层只与另一设备上相同的那一层通讯,实际的通讯是发生在每一设备上相邻的两层之间,而各个设备只通过物理层的通信介质连接在一起。
CAN总线规范定义了模型的最下面的两层:物理层和数据链路层。CAN总线驱动器和通信介质则实现了物理层的主要功能。CAN总线控制器实现了总线协议中规定的数据链路层的传输任务。常用的CAN总线驱动器有PHILIPS公司的PCA82C250,总线控制器是SJAl000,通信介质是双绞线或同轴电缆。
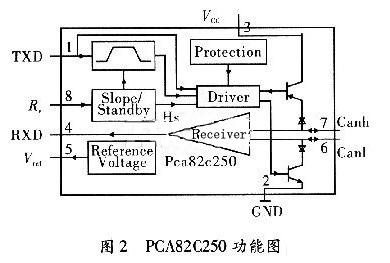
2.1 总线驱动器PCA82C250的工作原理
PCA82C250是CAN总线控制器与物理导线之间的接口,该驱动器可以提供对总线的差动发送和接收功能。PCA82C250的驱动部分由1 个PNP的极管和1个NPN的三极管组成。这2个三极管根据TXD的信号导通或截止。当TXD=0时,2个三极管处于导通状态时,总线上显示为显性电平。当TXD=1时,2个三极管处于截止状态,总线上显示为隐性电平,此时驱动器对总线的影响很小。因此,如果存在其他节点发送显性电平,则总线的电平状态就是显性,只有所有的驱动器都发送隐性电平,总线的电平状态才是隐性。实现了CAN总线物理层的线与功能。PCA82C250功能图,如图2所示。
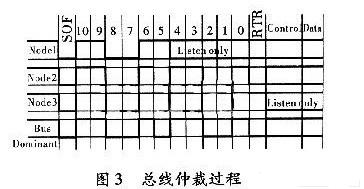
2.2 基于线与功能多节点仲裁过程
通信节点访问总线,对总线上信号进行检测,只有当总线处于空闲状态时,才允许发送。当总线上有多个节点同时进行发送时,必须通过“无损的逐位仲裁”方法来使有最高优先权的报文优先发送。在CAN总线上发送的每一条报文都具有惟一的11位或29位ID。CAN总线的状态取决于二进制数‘O’而不是 ‘1’,所以ID号越小,该报文拥有越高的优先权。因此一个为全‘0’标志符的报文具有总线上的最高级优先权。多节点仲裁过程如图3所示。
2.3 CAN控制器SJAl000的功能介绍
CAN的通信协议由CAN控制器完成,CAN控制器由实现CAN总线协议的部分和实现与微处理器接口部分的电路组成。
SJAl000是PHILIPS公司推出的一种高性能的CAN总线控制器,它不仅和PCA82C200的基本CAN模式(BasieCAN)兼容,而且还增强CAN模式 (PeliCAN),这种模式支持CAN2.0B协议。SJAl000以一块可编程芯片上的逻辑电路的组合来实现这些功能,提供了与模块控制器及微控制器的接口,通过对它的编程,CPU可设置它的工作方式,控制它的工作状态,与CAN驱动器PCA82C250进行数据的接收和发送。
3 CAN的帧结构
CAN协议规定了两种不同的帧格式,不同之处为标识符的长度不同,具有11位标识符的帧称之为标准帧,具有29位标识符的帧被称为扩展帧。
3.1 CAN帧类型
报文传输由以下4个不同的帧类型所表示和控制
(1)数据帧:携带数据从发送器至接收器。
(2)远程帧:由节点发送,请求发送具有相同标识符的数据帧。
(3)错误帧:由任何节点发出,检测到错误就发出错误帧。
(4)过载帧:用于提供先前和后续数据帧或远程帧之间的附加延时。
3.2 CAN扩展帧的数据帧结构
扩展帧的数据帧结构,如图4所示。
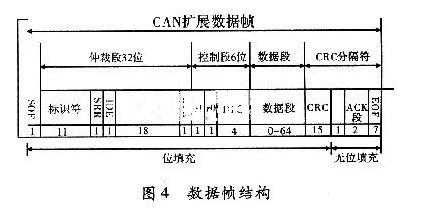
扩展帧的数据帧的主要结构有:
(1)帧起始,标志帧的开始,它由单个“显性”位构成,在总线空闲时发送,在总线上产生同步作用。
(2)仲裁域,仲裁域包括29位标识符、SRR位、IDE位、RTR位。29位标识符包括11位基本ID、18位扩展ID。基本ID按ID- 28到ID-18的顺序发送,扩展ID按ID-17到ID-0的顺序发送。基本ID首先发送,其次是SRR位和IDE位。扩展ID的发送位于IDE位之后。SRR是“隐性”位。IDE位在标准格式里为“显性”,在扩展格式里为“隐性”。RTR位在数据帧里必为“显性”,而在远程帧里必为“隐性”。标识符用于提供关于传送报文和总线访问的优先权信息,其数值越小,表示优先权越高,发生冲突时优先发送。
(3)控制域,由6位构成,前2位为保留位,为“显性”。后4位为数据长度码(DLC),表示数据域中数据的字节数,必须在0~8范围内变化。
(4)数据域,由被发送的数据组成,字节数为控制域中决定的0~8 bit,第一个字节的最高位首先被发送。
(5)CRC域,包括CRC(循环冗余码校验)序列(15位)和CRC界定符(1个“隐性”位),用于帧校验。
(6)应答域,由应答间隙和应答界定符组成,共2位。
(7)帧结束,由7位隐性位组成,此期间无位填充。
控制局域网CAN是现场总线技术中最成熟、最有发展前途的微处理器局域网络。协议采用总线型拓扑结构,通过研究CAN2.0B协议规范,制定了符合智能建筑监控系统的通信协议,并进行了通信节点软件的设计。
1 基于CAN总线的智能建筑网络拓扑结构
CAN总线的智能建筑监控系统拓扑结构,如图1所示。该系统由3部分组成:上位机、CAN通信节点和各个现场智能设备组成。通信节点的数量可根据建筑物的规模增减,CAN总线作为通信网络将各个节点连接成一个分布式智能监控系统。
(1)上位机:由计算机和监控软件组成,对整个智能建筑监控系统的管理和控制,是整个系统的中心。
(2)CAN通信节点:各通信节点功能相同,主要完成把现场设备采集到的实时数据发送到CAN总线上,接收CAN总线发送来的控制信息。CAN通信节点的硬件由微处理器、CAN控制器SJAl000、CAN收发器PCA82C250组成。
(3)现场智能设备:由微处理器、和现场功能装置等组成。完成检测、报警、控制、显示等功能。智能建筑监控系统现场设备由照明、空调、电梯、安全监控、消防监控、给排水,配电等组成。
2 CAN总线通信协议的硬件基础
CAN总线协议描述了信息在设备之间的传递规则,它对层的定义与开放系统互连模型OSI一致,CAN被分为应用层、数据链路层和物理层3层,各层之间互相透明,每一层只与另一设备上相同的那一层通讯,实际的通讯是发生在每一设备上相邻的两层之间,而各个设备只通过物理层的通信介质连接在一起。
CAN总线规范定义了模型的最下面的两层:物理层和数据链路层。CAN总线驱动器和通信介质则实现了物理层的主要功能。CAN总线控制器实现了总线协议中规定的数据链路层的传输任务。常用的CAN总线驱动器有PHILIPS公司的PCA82C250,总线控制器是SJAl000,通信介质是双绞线或同轴电缆。
2.1 总线驱动器PCA82C250的工作原理
PCA82C250是CAN总线控制器与物理导线之间的接口,该驱动器可以提供对总线的差动发送和接收功能。PCA82C250的驱动部分由1 个PNP的极管和1个NPN的三极管组成。这2个三极管根据TXD的信号导通或截止。当TXD=0时,2个三极管处于导通状态时,总线上显示为显性电平。当TXD=1时,2个三极管处于截止状态,总线上显示为隐性电平,此时驱动器对总线的影响很小。因此,如果存在其他节点发送显性电平,则总线的电平状态就是显性,只有所有的驱动器都发送隐性电平,总线的电平状态才是隐性。实现了CAN总线物理层的线与功能。PCA82C250功能图,如图2所示。
2.2 基于线与功能多节点仲裁过程
通信节点访问总线,对总线上信号进行检测,只有当总线处于空闲状态时,才允许发送。当总线上有多个节点同时进行发送时,必须通过“无损的逐位仲裁”方法来使有最高优先权的报文优先发送。在CAN总线上发送的每一条报文都具有惟一的11位或29位ID。CAN总线的状态取决于二进制数‘O’而不是 ‘1’,所以ID号越小,该报文拥有越高的优先权。因此一个为全‘0’标志符的报文具有总线上的最高级优先权。多节点仲裁过程如图3所示。
2.3 CAN控制器SJAl000的功能介绍
CAN的通信协议由CAN控制器完成,CAN控制器由实现CAN总线协议的部分和实现与微处理器接口部分的电路组成。
SJAl000是PHILIPS公司推出的一种高性能的CAN总线控制器,它不仅和PCA82C200的基本CAN模式(BasieCAN)兼容,而且还增强CAN模式 (PeliCAN),这种模式支持CAN2.0B协议。SJAl000以一块可编程芯片上的逻辑电路的组合来实现这些功能,提供了与模块控制器及微控制器的接口,通过对它的编程,CPU可设置它的工作方式,控制它的工作状态,与CAN驱动器PCA82C250进行数据的接收和发送。
3 CAN的帧结构
CAN协议规定了两种不同的帧格式,不同之处为标识符的长度不同,具有11位标识符的帧称之为标准帧,具有29位标识符的帧被称为扩展帧。
3.1 CAN帧类型
报文传输由以下4个不同的帧类型所表示和控制
(1)数据帧:携带数据从发送器至接收器。
(2)远程帧:由节点发送,请求发送具有相同标识符的数据帧。
(3)错误帧:由任何节点发出,检测到错误就发出错误帧。
(4)过载帧:用于提供先前和后续数据帧或远程帧之间的附加延时。
3.2 CAN扩展帧的数据帧结构
扩展帧的数据帧结构,如图4所示。
扩展帧的数据帧的主要结构有:
(1)帧起始,标志帧的开始,它由单个“显性”位构成,在总线空闲时发送,在总线上产生同步作用。
(2)仲裁域,仲裁域包括29位标识符、SRR位、IDE位、RTR位。29位标识符包括11位基本ID、18位扩展ID。基本ID按ID- 28到ID-18的顺序发送,扩展ID按ID-17到ID-0的顺序发送。基本ID首先发送,其次是SRR位和IDE位。扩展ID的发送位于IDE位之后。SRR是“隐性”位。IDE位在标准格式里为“显性”,在扩展格式里为“隐性”。RTR位在数据帧里必为“显性”,而在远程帧里必为“隐性”。标识符用于提供关于传送报文和总线访问的优先权信息,其数值越小,表示优先权越高,发生冲突时优先发送。
(3)控制域,由6位构成,前2位为保留位,为“显性”。后4位为数据长度码(DLC),表示数据域中数据的字节数,必须在0~8范围内变化。
(4)数据域,由被发送的数据组成,字节数为控制域中决定的0~8 bit,第一个字节的最高位首先被发送。
(5)CRC域,包括CRC(循环冗余码校验)序列(15位)和CRC界定符(1个“隐性”位),用于帧校验。
(6)应答域,由应答间隙和应答界定符组成,共2位。
(7)帧结束,由7位隐性位组成,此期间无位填充。
总线 CAN总线 收发器 三极管 电路 传感器 单片机 相关文章:
- 热插拔和缓冲I2C总线 (04-14)
- PCIe总线何时突破Unix服务器坚冰(02-03)
- TMS320VC5402 HPI接口与PCI总线接口设计(04-12)
- 基于Nios II的I2C总线接口的实现(04-09)
- 双口RAM CY7C026在高速数据采集系统中的应用(04-12)
- 计算机在新型多电机同步系统中的应用(07-08)