一种基于ARM的嵌入式网关系统设计与实现
时间:11-23
来源:互联网
点击:
3 CAN驱动程序设计
Linux驱动程序属于Linux内核的一部分,是嵌入式系统控制硬件的接口,它为用户屏蔽设备的工作细节,并向用户提供透明访问硬件设备的机制。驱动程序的开发在嵌入式系统开发中具有举足轻重的地位。开发出稳定、完备的驱动程序可提高整个系统的性能。
3.1 CAN驱动程序流程
MCP2510的内部结构框图如图2所示。
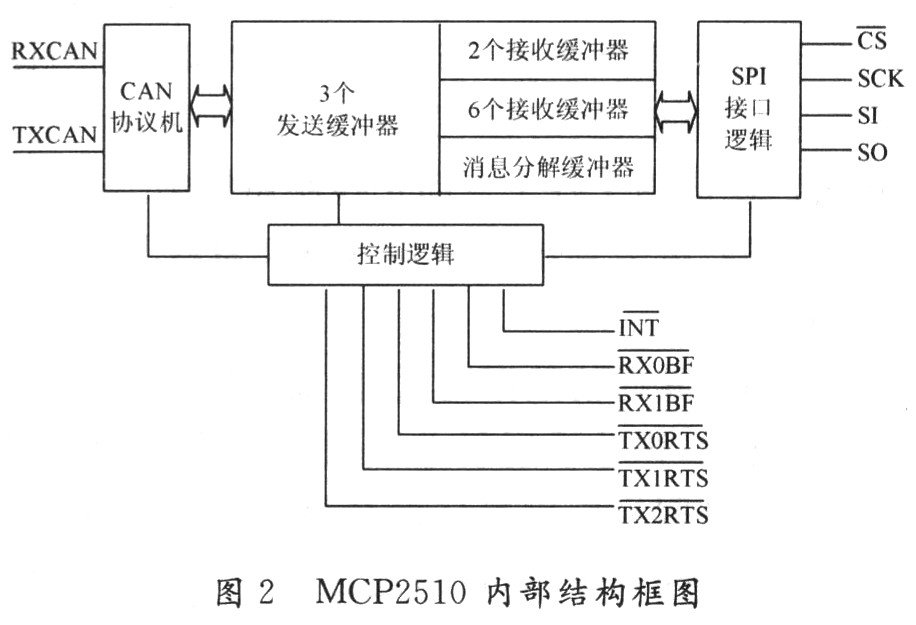
MCP2510内含3个发送缓冲器和2个接收缓冲器,同时还具有灵活的中断管理能力。CAN协议机负责与CAN总线的接口,SPI接口逻辑用于实现同MCU的通信,而寄存、缓冲器组与控制逻辑则用来完成各种方式的设定和操作控制。
在Linux多任务操作系统中,CAN总线通信程序的设计可分为发送数据模块、接收等待模块和中断处理模块实现。系统中CAN总线的数据发送和接收是两个不同的线程。在驱动程序中建立数据发送和接收缓冲区。中断处理程序只负责填充(或读取)缓冲区中的数据,然后唤醒等待接收(或发送)数据的任务。数据的发送与接收都通过独立的缓冲区,并由中断来实现。操作系统的中断响应时间在软件上决定了CAN总线数据的最快收发速度。
3.2 CAN设备驱动程序的实现要点
3.2.1 CAN设备驱动操作函数
CAN设备驱动程序最终提供给应用程序的是一个流控制接口,主要包括:open,realse,read,write,ioctl等操作。添加设备驱动程序,实际上就是给上述操作编写相应的程序代码。驱动程序加载到内核时,会首先运行驱动程序的初始化函数,然后等待系统调用在file_operations数据结构中定义的相关函数,实现对设备的操作。系统使用Linux 2.4.18版本,其文件系统接口被写义为:
s3c2410_mcp2510_open负责对将要进行的I/O操作做好必要的准备工作,主要包括限制CAN打开次数、清空3个发送缓冲区和2个接收缓冲区等。
s3c2410_mcp2510_write将要发送的数据通过SPI总线将数据传送MCP2510的发送缓冲器,再通过MCP2510将数据发送到CAN总线。
s3c2410_mcp2510_read用于将MCP2510从CAN总线上接收到接收缓冲器的数据,通过SPI总线读到用户区,并返回所读出的字节数。
s3c2410_mcp2510_ioctl用于控制CAN总线通信的波特率、设置帧ID、设置工作模式、设置设备滤波器等工作。
s3c2410_mcp2510_release用于释放所占用的内存、中断等资源。
3.2.2 CAN设备的初始化函数
CAN设备的初始化函数主要负责创建CAN设备的节点设备文件、注册CAN设备的中断处理函数、初始化MCP2510等工作。
在Linux系统中,初始化函数从s3c2410_mcp2510_init()开始。通过调用register_chrdev向系统注册字符型设备驱动程序;通过devfs_register()函数创建设备文件系统的CAN设备节点。同时,CAN设备驱动程序通过调用request_irq函数来申请中断,向系统注册CAN设备的CAN中断处理函数s3c2410_isr_mcp2510()。在实现了MCP2510的各个接口函数后,还需要编写MCP2510的模块加载函数module_init()和模块卸载函数module_exit(),用于向内核注册设备及注销设备。
3.2.3 驱动程序的加载与使用
Linux设备驱动会以内核模块的形式出现。Eth-ernet/CAN网关设备驱动程序作为内核的一部分,应在编译时把设备驱动程序编译成可加载的模块。当使用insmod命令加载内核模块时,模块的加载函数mod-ule_init(初始化函数名)会自动被内核执行,将初始化函数加入内核全局初始化函数列表中,在内核初始化时执行驱动的初始化函数,从而完成驱动的初始化和注册,之后驱动便停止等待,被应用程序调用。当用rm-mod命令卸载某内核模块时,模块的卸载函数module_exit(退出处理函数名)也会自动被内核执行,完成与模块加载函数相反的功能。当驱动程序加载到内核中后,就可将CAN设备文件进行open,read,write,release等操作。
4 结语
随着工业控制系统性能的提高,以太网在工业上的应用也会越来越广泛。在此详细介绍了一种嵌入式网关的设计与实现。作为连接以太网和现场总线的纽带,实现以太网与CAN现场总线之间的协议转换,为CAN/Ethernet的互联提供了一种传输速度快、成本低,稳定性和安全性高的解决方案。同时,利用嵌入式ARM处理器,接口资源丰富,设计通用性强,便于扩展其他现场总线与以太网的互联,具有较好的应用推广价值。
Linux驱动程序属于Linux内核的一部分,是嵌入式系统控制硬件的接口,它为用户屏蔽设备的工作细节,并向用户提供透明访问硬件设备的机制。驱动程序的开发在嵌入式系统开发中具有举足轻重的地位。开发出稳定、完备的驱动程序可提高整个系统的性能。
3.1 CAN驱动程序流程
MCP2510的内部结构框图如图2所示。
MCP2510内含3个发送缓冲器和2个接收缓冲器,同时还具有灵活的中断管理能力。CAN协议机负责与CAN总线的接口,SPI接口逻辑用于实现同MCU的通信,而寄存、缓冲器组与控制逻辑则用来完成各种方式的设定和操作控制。
在Linux多任务操作系统中,CAN总线通信程序的设计可分为发送数据模块、接收等待模块和中断处理模块实现。系统中CAN总线的数据发送和接收是两个不同的线程。在驱动程序中建立数据发送和接收缓冲区。中断处理程序只负责填充(或读取)缓冲区中的数据,然后唤醒等待接收(或发送)数据的任务。数据的发送与接收都通过独立的缓冲区,并由中断来实现。操作系统的中断响应时间在软件上决定了CAN总线数据的最快收发速度。
3.2 CAN设备驱动程序的实现要点
3.2.1 CAN设备驱动操作函数
CAN设备驱动程序最终提供给应用程序的是一个流控制接口,主要包括:open,realse,read,write,ioctl等操作。添加设备驱动程序,实际上就是给上述操作编写相应的程序代码。驱动程序加载到内核时,会首先运行驱动程序的初始化函数,然后等待系统调用在file_operations数据结构中定义的相关函数,实现对设备的操作。系统使用Linux 2.4.18版本,其文件系统接口被写义为:
s3c2410_mcp2510_open负责对将要进行的I/O操作做好必要的准备工作,主要包括限制CAN打开次数、清空3个发送缓冲区和2个接收缓冲区等。
s3c2410_mcp2510_write将要发送的数据通过SPI总线将数据传送MCP2510的发送缓冲器,再通过MCP2510将数据发送到CAN总线。
s3c2410_mcp2510_read用于将MCP2510从CAN总线上接收到接收缓冲器的数据,通过SPI总线读到用户区,并返回所读出的字节数。
s3c2410_mcp2510_ioctl用于控制CAN总线通信的波特率、设置帧ID、设置工作模式、设置设备滤波器等工作。
s3c2410_mcp2510_release用于释放所占用的内存、中断等资源。
3.2.2 CAN设备的初始化函数
CAN设备的初始化函数主要负责创建CAN设备的节点设备文件、注册CAN设备的中断处理函数、初始化MCP2510等工作。
在Linux系统中,初始化函数从s3c2410_mcp2510_init()开始。通过调用register_chrdev向系统注册字符型设备驱动程序;通过devfs_register()函数创建设备文件系统的CAN设备节点。同时,CAN设备驱动程序通过调用request_irq函数来申请中断,向系统注册CAN设备的CAN中断处理函数s3c2410_isr_mcp2510()。在实现了MCP2510的各个接口函数后,还需要编写MCP2510的模块加载函数module_init()和模块卸载函数module_exit(),用于向内核注册设备及注销设备。
3.2.3 驱动程序的加载与使用
Linux设备驱动会以内核模块的形式出现。Eth-ernet/CAN网关设备驱动程序作为内核的一部分,应在编译时把设备驱动程序编译成可加载的模块。当使用insmod命令加载内核模块时,模块的加载函数mod-ule_init(初始化函数名)会自动被内核执行,将初始化函数加入内核全局初始化函数列表中,在内核初始化时执行驱动的初始化函数,从而完成驱动的初始化和注册,之后驱动便停止等待,被应用程序调用。当用rm-mod命令卸载某内核模块时,模块的卸载函数module_exit(退出处理函数名)也会自动被内核执行,完成与模块加载函数相反的功能。当驱动程序加载到内核中后,就可将CAN设备文件进行open,read,write,release等操作。
4 结语
随着工业控制系统性能的提高,以太网在工业上的应用也会越来越广泛。在此详细介绍了一种嵌入式网关的设计与实现。作为连接以太网和现场总线的纽带,实现以太网与CAN现场总线之间的协议转换,为CAN/Ethernet的互联提供了一种传输速度快、成本低,稳定性和安全性高的解决方案。同时,利用嵌入式ARM处理器,接口资源丰富,设计通用性强,便于扩展其他现场总线与以太网的互联,具有较好的应用推广价值。
总线 半导体 自动化 汽车电子 CAN总线 嵌入式 ARM 电路 S3C2410 MIPS LCD 收发器 电阻 LTE Linux MCU 滤波器 相关文章:
- 热插拔和缓冲I2C总线 (04-14)
- PCIe总线何时突破Unix服务器坚冰(02-03)
- TMS320VC5402 HPI接口与PCI总线接口设计(04-12)
- 基于Nios II的I2C总线接口的实现(04-09)
- 双口RAM CY7C026在高速数据采集系统中的应用(04-12)
- 计算机在新型多电机同步系统中的应用(07-08)