基于ARM的橡塑机械双层网络监控器设计
时间:11-08
来源:互联网
点击:
4.2 应用软件设计
4.2.1 CAN服务器端设计
CAN服务器端需要完成两大部分的工作。一是和底层控制器交互,二是处理并存储好相应的数据,以提供给人机界面和WEB服务器使用。
CAN总线默认的调度方式为CAMA/CD协议,该协议原理比较简单,技术上易实现,网络中各节点处于平等地位,不需集中控制,不提供优先级控制。但在网络负载增大时,发送时间增长,发送效率急剧下降,即会永远优先发送优先级高的节点而阻塞优先级低的节点,因此考虑到对该协议进行改进。为了自定义协议,因此我们的CAN数据采用了扩展帧。
针对橡塑机械需要的通信数据类型设计了如下的通信协议。主要具备以下几点特点:
(1)下位机根据仲裁段优先级来确定该段数据的优先级;
(2)优先级的分配由服务器端进行,读取初始化配置文件(包括节点编号和优先级码两个部分)+页面设定;
(3)优先级根据传输数据的截止时间决定(DM)。要求的时间越短,其优先级越高。
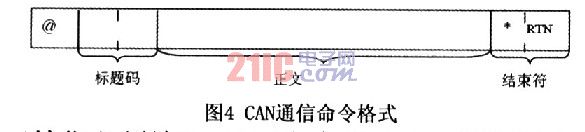
(4)通信数据的命令格式如图4所示,其中所有字节均为ASCII字符。
开始位必须放@,以示命令的开始。标题码为命令的代码;用”*”和回车(ASCII码为13)作为命令结束。
一次通讯的流程如图5所示。
设计了两个队列,分别为发送队列和接收队列,以处理大量数据的发送问题。在队列中的数据按照其优先级排序(DM判定)。
4.2.2 WEB服务器的移植
Boa是一个运行在类Unix系统中的小型Web Server,特别适合在嵌入式的场合中使用,其优点在于快速性和可靠性。
Boa网络服务器的移植主要有两个部分:src下的文件修改和config文件修改。Src部分需要修改应用的硬件平台配置,指定交叉编译器等。config文件需要针对监控器设备所处网络环境来配置端口号等。
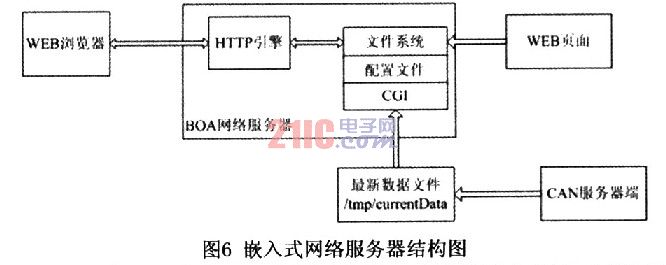
根据移植好的Boa,设计了图6所示结构的远程橡塑机械WEB Server。
Boa服务器用以处理用户请求,并返回数据给浏览器。当浏览器需要访问监控器上动态的监控数据时,Boa服务器将调用存储在服务器中的CGI(公用网关接口)程序。首先浏览器提交请求,Boa接收网络数据后进行解析,再根据请求数据调用相关的CGI程序,CGI生成相关页面数据向屏幕输出,此时这个输出被定义为到Boa的输入,Boa再返回数据给浏览器客户端。上述CGI程序中实现了对实时更新的数据文件/tmp/currentData的调用,并输出给浏览器端。
5 在橡塑机械上的应用实例
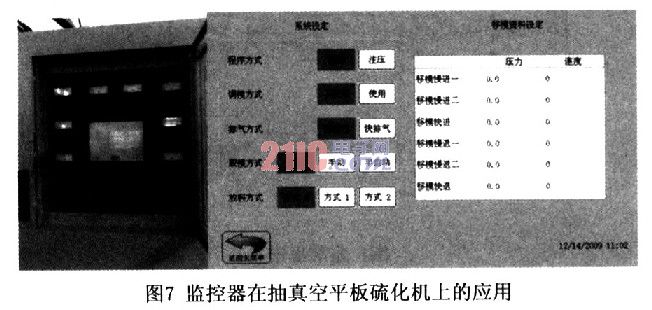
本网络监控器配合相应的图形用户界面程序已经成功应用于抽真空平板硫化机上,目前已经实现了双机的同时监控。通过本监控器可实时监控抽真空平板硫化机在运行当中的各工序,配置硫化机的各项生产工艺参数。远程的计算机也可通过局域网读取到监控器上的运行设备。
6 结束语
ARM9、嵌入式Linux操作系统、以及CAN总线和网络技术在本监控器上的应用将结构简单、功能局限的一对一的橡塑机械监控器扩展到了网络化、信息化的集成系统当中。CAN总线数据的按优先级调度能适应多任务、大容量数据的处理,可有效提高监控器的实时性能,而嵌入式WEB服务器的成功移植实现了远程的监测和维护,可大大缩短维护时间开销,减少维护成本。
同样,本控制器不仅仅局限于现今应用中的抽真空平板硫化机,其网络的架构理念使得只需要将具体通信数据协议以及与人机界面程序的接口稍作修改即可应用于其他的橡塑机械乃至于其他工业控制应用场合。
4.2.1 CAN服务器端设计
CAN服务器端需要完成两大部分的工作。一是和底层控制器交互,二是处理并存储好相应的数据,以提供给人机界面和WEB服务器使用。
CAN总线默认的调度方式为CAMA/CD协议,该协议原理比较简单,技术上易实现,网络中各节点处于平等地位,不需集中控制,不提供优先级控制。但在网络负载增大时,发送时间增长,发送效率急剧下降,即会永远优先发送优先级高的节点而阻塞优先级低的节点,因此考虑到对该协议进行改进。为了自定义协议,因此我们的CAN数据采用了扩展帧。
针对橡塑机械需要的通信数据类型设计了如下的通信协议。主要具备以下几点特点:
(1)下位机根据仲裁段优先级来确定该段数据的优先级;
(2)优先级的分配由服务器端进行,读取初始化配置文件(包括节点编号和优先级码两个部分)+页面设定;
(3)优先级根据传输数据的截止时间决定(DM)。要求的时间越短,其优先级越高。
(4)通信数据的命令格式如图4所示,其中所有字节均为ASCII字符。
开始位必须放@,以示命令的开始。标题码为命令的代码;用”*”和回车(ASCII码为13)作为命令结束。
一次通讯的流程如图5所示。

设计了两个队列,分别为发送队列和接收队列,以处理大量数据的发送问题。在队列中的数据按照其优先级排序(DM判定)。
4.2.2 WEB服务器的移植
Boa是一个运行在类Unix系统中的小型Web Server,特别适合在嵌入式的场合中使用,其优点在于快速性和可靠性。
Boa网络服务器的移植主要有两个部分:src下的文件修改和config文件修改。Src部分需要修改应用的硬件平台配置,指定交叉编译器等。config文件需要针对监控器设备所处网络环境来配置端口号等。
根据移植好的Boa,设计了图6所示结构的远程橡塑机械WEB Server。
Boa服务器用以处理用户请求,并返回数据给浏览器。当浏览器需要访问监控器上动态的监控数据时,Boa服务器将调用存储在服务器中的CGI(公用网关接口)程序。首先浏览器提交请求,Boa接收网络数据后进行解析,再根据请求数据调用相关的CGI程序,CGI生成相关页面数据向屏幕输出,此时这个输出被定义为到Boa的输入,Boa再返回数据给浏览器客户端。上述CGI程序中实现了对实时更新的数据文件/tmp/currentData的调用,并输出给浏览器端。
5 在橡塑机械上的应用实例
本网络监控器配合相应的图形用户界面程序已经成功应用于抽真空平板硫化机上,目前已经实现了双机的同时监控。通过本监控器可实时监控抽真空平板硫化机在运行当中的各工序,配置硫化机的各项生产工艺参数。远程的计算机也可通过局域网读取到监控器上的运行设备。
6 结束语
ARM9、嵌入式Linux操作系统、以及CAN总线和网络技术在本监控器上的应用将结构简单、功能局限的一对一的橡塑机械监控器扩展到了网络化、信息化的集成系统当中。CAN总线数据的按优先级调度能适应多任务、大容量数据的处理,可有效提高监控器的实时性能,而嵌入式WEB服务器的成功移植实现了远程的监测和维护,可大大缩短维护时间开销,减少维护成本。
同样,本控制器不仅仅局限于现今应用中的抽真空平板硫化机,其网络的架构理念使得只需要将具体通信数据协议以及与人机界面程序的接口稍作修改即可应用于其他的橡塑机械乃至于其他工业控制应用场合。
ARM 嵌入式 Linux 总线 自动化 CAN总线 S3C2410 相关文章:
- 基于GPRS网络的GPS图形导航仪 (01-05)
- 基于ARM9内核Processor对外部NAND FLASH的控制实现(07-12)
- 基于ARM的局域网IP电话设计(05-11)
- Actel和ARM联合开发专为FPGA应用而优化的高性能32位处理器(02-26)
- 基于ARM的定时继电器驱动模板的设计(08-04)
- 基于ARM平台的GPRS CQT测试系统的设计(08-10)