CAN总线在基于DSP 的逆变器并联运行控制中的应用
时间:07-24
来源:互联网
点击:
采用模块化的逆变电源并联运行构成大容量的备用电源系统具有一系列优点:首先从使用者的角度来看,第一是扩容方便,因而在系统设计选型时可以比较随意;第二是维护简便,当某个模块发生故障时只需用新模块将其替换下来即可,而不影响系统的输出,因而在使用过程中可以节约人力物力。其次从生产者的角度来看,标准化的模块便于生产的规模化,从而更容易降低产品的设计、生产和调试成本,提高竞争力。
1 逆变器并联运行控制的方法
逆变器是直流输入、交流输出的电能变换器。多个逆变器并联运行时必须保证各逆变器的交流输出电压保持严格的同频率、同相位和等幅值,否则就会在不同逆变器之间产生环流,从而降低系统的输出容量,甚至烧毁逆变器。然而,绝对的同频、同相和等幅值是无法实现的,因而有必要对环流进行分析,从而找出抑制环流,确保系统运行稳定、安全的控制措施。理论分析表明:并联系统中各单元的输出电压的相位差主要造成有功功率的差异,使得在各并联单元之间形成有功环流;而输出电压的幅值差则主要导致无功功率的差异,使各并联单元之间形成无功环流;而且如果两个逆变器之间的相位差很小的话,可以近似认为有功功率差与相位差成正比,无功功率差与幅值差成正比。
由此出发,目前有两种均流控制方法:一种是以各模块的平均无功功率作为每个模块无功功率的给定值,求出偏差并以此为据调整模块输出的幅值;以各模块的平均有功功率作为每个模块有功功率的给定值,求出偏差并以此为据调整模块输出的相位角。另一种均流控制方法是:采用“基于抢占与并发的同步控制方式” 控制各并联单元的输出相位(这种方法可以达到很高的同步精度,使得系统中的有功环流可以忽略不计) ,然后直接依据各单元的输出电流与系统平均输出电流的偏差调节各单元的输出电压幅值,以实现各模块输出的均流和负载的均衡分配。
显然,无论采用哪一种方法进行均流控制,都必须保证在各并联单元之间有稳定、可靠的数据通讯。在这方面,现场总线CAN 无疑是非常适合的。
2 CAN总线的特点介绍
控制器局域网CAN (Cont roller Area Network)最初是为汽车的监测、控制系统而开发的一种串行通信协议。由于它具有良好的功能特性、很强的抗干扰能力和极高的可靠性,所以在各种监测、控制系统中获得了广泛的应用。
2. 1 CAN总线的特点
具体来讲,CAN具有如下特点:
①结构简单,只需两根信号线,介质可以采用双绞线、同轴电缆或光导纤维。
②通信方式灵活,以多主方式工作,网络上的任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息。
③网络上的节点信息可以分成不同的优先级,从而满足不同的实时性要求。
④采用短帧格式通信,每帧最多8个字节数据,不会占用总线很长时间,从而保证了通信的实时性,同时也可以满足通常的工业控制领域中的数据通讯要求。
⑤采用无破坏性的基于优先权的总线仲裁技术,当两个节点同时向总线上发送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可以不受影响地继续发送数据。
⑥通信距离可达10 km(速率5 kb/s以下) ,通讯速率可达1 Mb/s(距离40m以下) 。
⑦采用CRC校验,并且提供了相应的错误处理机制,从而保证了数据通信的可靠性。
2. 2 CAN协议的数据帧格式
一个有效的CAN数据帧由帧起始、仲裁域、控制域、数据域、校验域、应答域和帧结束组成。在CAN2.0B中存在两种不同的帧格式,它们的区别在于标识符的长度不同:标准帧的标识符有11位,扩展帧的标识符有29位。标准帧的结构为图1 所示。
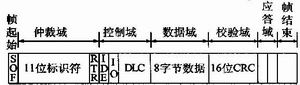
图1 标准帧的结构
扩展帧的结构为图2 所示。CAN 协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点是可以使网络内的节点数在实际应用中几乎不用考虑;数据块的标识符可以由11位或29位二进制数组成,因此可以定义211或229个不同的数据块。这种按数据块编码的方式,还可以使不同的节点接收到相同的数据,这一点在分布式控制系统中非常有用。
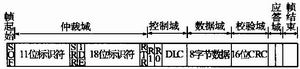
图2 扩展帧的结构
总之,CAN总线由于其卓越的特性、极高的可靠性和独特的设计,特别适合工业工程监控设备的互连,因此,越来越受到工业界的重视,并已成为公认的最有前途的现场总线之一。
3 基于DSP 的逆变器并联运行控制器中的CAN通信应用
我们以TI 公司的数字信号处理器DSP TMS320LF2407A 为核心设计制作了逆变器并联运行控制器,采用了“基于抢占与并发的同步控制方式”,利用CAN总线在各逆变器之间进行数据通信,传递各模块的模块号和输出电流有效值,然后各模块计算出单个模块的理想输出电流值,再根据自己的实际输出值与理想值之间的误差来调节模块输出电压的大小,从而实现均流控制。我们称这种方法为“直接电流均流法”。
1 逆变器并联运行控制的方法
逆变器是直流输入、交流输出的电能变换器。多个逆变器并联运行时必须保证各逆变器的交流输出电压保持严格的同频率、同相位和等幅值,否则就会在不同逆变器之间产生环流,从而降低系统的输出容量,甚至烧毁逆变器。然而,绝对的同频、同相和等幅值是无法实现的,因而有必要对环流进行分析,从而找出抑制环流,确保系统运行稳定、安全的控制措施。理论分析表明:并联系统中各单元的输出电压的相位差主要造成有功功率的差异,使得在各并联单元之间形成有功环流;而输出电压的幅值差则主要导致无功功率的差异,使各并联单元之间形成无功环流;而且如果两个逆变器之间的相位差很小的话,可以近似认为有功功率差与相位差成正比,无功功率差与幅值差成正比。
由此出发,目前有两种均流控制方法:一种是以各模块的平均无功功率作为每个模块无功功率的给定值,求出偏差并以此为据调整模块输出的幅值;以各模块的平均有功功率作为每个模块有功功率的给定值,求出偏差并以此为据调整模块输出的相位角。另一种均流控制方法是:采用“基于抢占与并发的同步控制方式” 控制各并联单元的输出相位(这种方法可以达到很高的同步精度,使得系统中的有功环流可以忽略不计) ,然后直接依据各单元的输出电流与系统平均输出电流的偏差调节各单元的输出电压幅值,以实现各模块输出的均流和负载的均衡分配。
显然,无论采用哪一种方法进行均流控制,都必须保证在各并联单元之间有稳定、可靠的数据通讯。在这方面,现场总线CAN 无疑是非常适合的。
2 CAN总线的特点介绍
控制器局域网CAN (Cont roller Area Network)最初是为汽车的监测、控制系统而开发的一种串行通信协议。由于它具有良好的功能特性、很强的抗干扰能力和极高的可靠性,所以在各种监测、控制系统中获得了广泛的应用。
2. 1 CAN总线的特点
具体来讲,CAN具有如下特点:
①结构简单,只需两根信号线,介质可以采用双绞线、同轴电缆或光导纤维。
②通信方式灵活,以多主方式工作,网络上的任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息。
③网络上的节点信息可以分成不同的优先级,从而满足不同的实时性要求。
④采用短帧格式通信,每帧最多8个字节数据,不会占用总线很长时间,从而保证了通信的实时性,同时也可以满足通常的工业控制领域中的数据通讯要求。
⑤采用无破坏性的基于优先权的总线仲裁技术,当两个节点同时向总线上发送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可以不受影响地继续发送数据。
⑥通信距离可达10 km(速率5 kb/s以下) ,通讯速率可达1 Mb/s(距离40m以下) 。
⑦采用CRC校验,并且提供了相应的错误处理机制,从而保证了数据通信的可靠性。
2. 2 CAN协议的数据帧格式
一个有效的CAN数据帧由帧起始、仲裁域、控制域、数据域、校验域、应答域和帧结束组成。在CAN2.0B中存在两种不同的帧格式,它们的区别在于标识符的长度不同:标准帧的标识符有11位,扩展帧的标识符有29位。标准帧的结构为图1 所示。
图1 标准帧的结构
扩展帧的结构为图2 所示。CAN 协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点是可以使网络内的节点数在实际应用中几乎不用考虑;数据块的标识符可以由11位或29位二进制数组成,因此可以定义211或229个不同的数据块。这种按数据块编码的方式,还可以使不同的节点接收到相同的数据,这一点在分布式控制系统中非常有用。
图2 扩展帧的结构
总之,CAN总线由于其卓越的特性、极高的可靠性和独特的设计,特别适合工业工程监控设备的互连,因此,越来越受到工业界的重视,并已成为公认的最有前途的现场总线之一。
3 基于DSP 的逆变器并联运行控制器中的CAN通信应用
我们以TI 公司的数字信号处理器DSP TMS320LF2407A 为核心设计制作了逆变器并联运行控制器,采用了“基于抢占与并发的同步控制方式”,利用CAN总线在各逆变器之间进行数据通信,传递各模块的模块号和输出电流有效值,然后各模块计算出单个模块的理想输出电流值,再根据自己的实际输出值与理想值之间的误差来调节模块输出电压的大小,从而实现均流控制。我们称这种方法为“直接电流均流法”。
逆变器 电压 电流 总线 CAN总线 DSP 德州仪器 PWM 相关文章:
- 基于W77E58双串口通信的监控系统(03-22)
- 智能电网的电力线通信系统(05-14)
- 光纤在太阳能系统的应用(01-12)
- 使用光纤升级现有的工业网络(07-10)
- 无线通信技术在智能电网中的应用(09-09)
- 云间宽带电力线载波PLC常见问题解答!(05-08)