多仿生机器鱼通信子系统设计
时间:06-19
来源:互联网
点击:
|
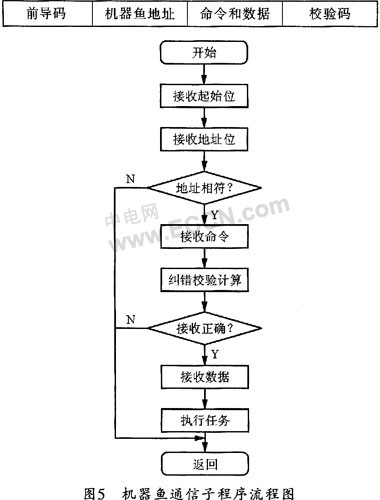
3 纠错编码的设计
在无线通信系统中,尽管硬件电路中已引入了一些抗干扰措施,但数据在传输过程中,不可避免地还会受到各种干扰,从而使通信接收端收到的数据与发送端实际发出的数据出现不一致的现象。因此,为了保证系统的可靠性,设计时必须在通信系统中加入差错控制编码(纠错编码)措施。常用的纠错控制方式主要有三种:检错重发(ARQ)、前向纠错(FEC)和混合纠错(HEC)。本系统是单工通信方式,适合采用既有检错功能又有纠错功能的BCH (7,4)前向纠错分组码控制,因而需要使用两字节的长度来发送一字节的有效信息。事实证明,该纠错方式无论在多机器鱼系统还是在足球机器人系统都取得了较好的效果。
4 结束语
本文介绍了多仿生机器鱼通信子系统的接收和发射单元的硬件设计和通信协议。讨论了机器鱼通信子系统的软件运行程序和通信中的纠错编码设计方法。该方法可极大的提高MRFS的可靠性,从而为拓展MRFS功能提供了一个可靠的平台。
仿真 AVR 单片机 嵌入式 电压 电流 CMOS 电路 Intersil 无线电 MIPS 机器人 相关文章:
- 一种基于OPNET的小型网络仿真及分析(04-08)
- APOX软件在A+B频段无线网络规划中的应用(06-26)
- 基于GUI的跳频OFDM系统仿真设计(03-03)
- 基于CPLD的RS-232串口通信实现(04-23)
- 2.5 Gbps收发器中1∶2解复用电路的设计(09-17)
- 填补网络 SoC 设计前端与后端验证的差距(09-19)