CPLD的DSP多SPI端口通信设计
时间:03-24
来源:互联网
点击:
3 DSP中SPl的开发过程
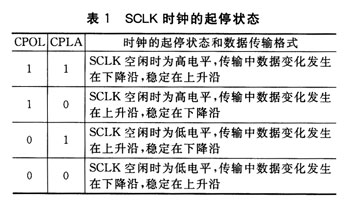
SPI端口数据传输的特点是:主设备的时钟信号出现与否决定数据传输的开始,一旦检测到时钟信号即开始传输,时钟信号无效后传输结束。这期间,从设备使能时钟信号的起停状态很重要[2]。 DSP56F801的SPI端口的时钟信号起停状态如表1所列。在设计中设置的SPI控制寄存器的CPOL和CPLA位是“11”。ScLK空闲时为高电平,传输中数据变化发生在下降沿,稳定在上升沿。从图2可看出实现了与CPLD中的移位锁存电路的匹配,传输正确。SPI端口协议要求系统上电复位后,从机先于主机开始工作。如果从机在主机之后开始工作,就有可能丢掉部分时钟信号,使得从机并不是从数据的第一位开始接收,造成数据流的不同步。可通过硬件延时或软件延时的方法,来确保从机先于主机工作口[2]。本设计采用软件延时的办法来实现数据流的同步。这个延时由两部分组成,一部分是DSP串行输出数据的时间延时,另外一部分就是后续数字电路中的延时。延时的具体计算过程如下:数据传输时使用的时钟信号是对总线时钟的2分频,当DSP的主频是60 MHz时,总线时钟频率是30MHz,对它进行2分频,可以计算出SCLK的周期是66.6ns(实际所测出的周期是78.2 ns)。另外通过测试得到PwM电路的延时最长时间是23.6 ns,锁存器的最大延时是7.6 ns,移位寄存器的最大延时是3.0 ns。由上述对CPLD数字电路的延时和对SCLK周期的测试,就可以得到这样一个结论:设PwM电路的延时时间为t1、锁存器的延时时间为t2、移位寄存器的延时时间为t3,SCLK的时钟周期是Tc,在SPI传输的过程中,整个电路的延时t可以这样计算:
由于数字电路传输中存在这样的延时,所以在写DSP程序时,需要加入一定的延时。此实验中加入的延时是2μs,可以实现可靠传输。
4 实验结果
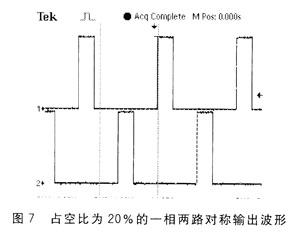
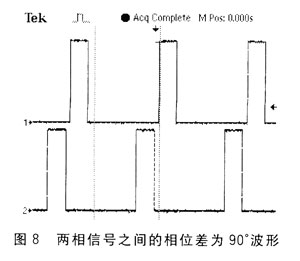
本设计采用全数字结构,易于用CPLD实现。以 EPM7256为目标芯片,设计并实现了正确的数据传输。当DSP56F801输出的十六进制参数分别为频率字DBOE,相位字0403,A相的占空比字 04CE,B相的占空比字04CD时,波形输出如图7、图8所示。图7给出了信号发生器A相输出信号的实测波形,信号占空比调节为20%;图8给出了A相输出信号1和B相输出信号1的实测波形,两相信号相位差调节为常用的90。。该实验结果表明,参数传输正确,波形输出良好。
结语
SPI通信方法具有硬件连接简单、使用方便等优点,应用广泛。采取硬件和软件相结合的措施,可以确保SPI通信中数据的同步,实现可靠通信。本文给出了DSP多SPI端口通信的实际与实现过程,讨论了其中的关键技术问题。SPI多端口通信方法基于CPLD实现,易移植,易于实现功能扩展,可广泛应用于各种采用SPI通信方式的自动化装置。
参考文献
1. 史敬灼.姚春丽 应用于超声波电机驱动的对称PWM控制信号发生器 [期刊论文] -电气应用2008(13)
2. DSP56800 16?Bit Digital Signal Processor Family Manual 2003
3. 夏长亮.郑尧.史婷娜 行波型超声波电机PWM驱动控制系统研究 [期刊论文] -电力电子技术2001(3)
4. 邵贝贝.龚光华.薛涛 Motorola DSP型16位单片机原理与实践 2003
5. 范寿康.康广荃 Freescale 16位DSP原理与技术开发 2006
作者:河南科技大学 姚春丽 史敬灼
来源:单片机与嵌入式系统应用 2009 (4)
SPI端口数据传输的特点是:主设备的时钟信号出现与否决定数据传输的开始,一旦检测到时钟信号即开始传输,时钟信号无效后传输结束。这期间,从设备使能时钟信号的起停状态很重要[2]。 DSP56F801的SPI端口的时钟信号起停状态如表1所列。在设计中设置的SPI控制寄存器的CPOL和CPLA位是“11”。ScLK空闲时为高电平,传输中数据变化发生在下降沿,稳定在上升沿。从图2可看出实现了与CPLD中的移位锁存电路的匹配,传输正确。SPI端口协议要求系统上电复位后,从机先于主机开始工作。如果从机在主机之后开始工作,就有可能丢掉部分时钟信号,使得从机并不是从数据的第一位开始接收,造成数据流的不同步。可通过硬件延时或软件延时的方法,来确保从机先于主机工作口[2]。本设计采用软件延时的办法来实现数据流的同步。这个延时由两部分组成,一部分是DSP串行输出数据的时间延时,另外一部分就是后续数字电路中的延时。延时的具体计算过程如下:数据传输时使用的时钟信号是对总线时钟的2分频,当DSP的主频是60 MHz时,总线时钟频率是30MHz,对它进行2分频,可以计算出SCLK的周期是66.6ns(实际所测出的周期是78.2 ns)。另外通过测试得到PwM电路的延时最长时间是23.6 ns,锁存器的最大延时是7.6 ns,移位寄存器的最大延时是3.0 ns。由上述对CPLD数字电路的延时和对SCLK周期的测试,就可以得到这样一个结论:设PwM电路的延时时间为t1、锁存器的延时时间为t2、移位寄存器的延时时间为t3,SCLK的时钟周期是Tc,在SPI传输的过程中,整个电路的延时t可以这样计算:
由于数字电路传输中存在这样的延时,所以在写DSP程序时,需要加入一定的延时。此实验中加入的延时是2μs,可以实现可靠传输。
4 实验结果
本设计采用全数字结构,易于用CPLD实现。以 EPM7256为目标芯片,设计并实现了正确的数据传输。当DSP56F801输出的十六进制参数分别为频率字DBOE,相位字0403,A相的占空比字 04CE,B相的占空比字04CD时,波形输出如图7、图8所示。图7给出了信号发生器A相输出信号的实测波形,信号占空比调节为20%;图8给出了A相输出信号1和B相输出信号1的实测波形,两相信号相位差调节为常用的90。。该实验结果表明,参数传输正确,波形输出良好。
结语
SPI通信方法具有硬件连接简单、使用方便等优点,应用广泛。采取硬件和软件相结合的措施,可以确保SPI通信中数据的同步,实现可靠通信。本文给出了DSP多SPI端口通信的实际与实现过程,讨论了其中的关键技术问题。SPI多端口通信方法基于CPLD实现,易移植,易于实现功能扩展,可广泛应用于各种采用SPI通信方式的自动化装置。
参考文献
1. 史敬灼.姚春丽 应用于超声波电机驱动的对称PWM控制信号发生器 [期刊论文] -电气应用2008(13)
2. DSP56800 16?Bit Digital Signal Processor Family Manual 2003
3. 夏长亮.郑尧.史婷娜 行波型超声波电机PWM驱动控制系统研究 [期刊论文] -电力电子技术2001(3)
4. 邵贝贝.龚光华.薛涛 Motorola DSP型16位单片机原理与实践 2003
5. 范寿康.康广荃 Freescale 16位DSP原理与技术开发 2006
作者:河南科技大学 姚春丽 史敬灼
来源:单片机与嵌入式系统应用 2009 (4)
自动化 CPLD DSP LED PWM 信号发生器 振荡器 电路 电压 总线 电力电子 单片机 Freescale 嵌入式 相关文章:
- 中压电力线通信技术(01-07)
- 北京华深校园办公自动化系统方案(02-14)
- 基于DSP技术的变电站综合自动化系统简介(11-10)
- 数据中心的网络虚拟化和自动化(01-31)
- OFDM调制技术的配电自动化通信系统研究(02-17)
- 基于ITIL的云计算实施方案 (02-08)