基于磁阻传感器的车流量检测系统应用设计
当磁阻传感器暴露于干扰磁场中,容易受到大磁场的干扰影响。当磁阻传感器的检测磁场超出±6Gs范围,传感器的输出将不再保持线性关系,其灵敏度也将随之降低,从而引起输出信号的衰变,将无法准确检测弱信号磁常为避免这种情况出现,影响检测精度,将脉冲信号施加到HMC1022芯片自带的内集成置位/复位电流带,以恢复其原来的高灵敏度。
本设计中MOSFET开关管选用增强型高压场效应管AO4606.由单片机定时器模块在每隔100ms的高电平后产生一个不小于2us脉宽的低电平时钟信号,从而切换MOS管的导通和截止,产生可控制置位/复位电流带的脉冲信号。
4.算法实现
鉴于该系统要求传感器节点的检测数据能通过无线通信模块与上位机进行实时通讯,且单片机存储空间有限,车流量检测算法不能消耗单片机太多存储空间和计算时间。Ding等提出多中间状态机算法,该算法计算简单、精度高,并且能在单片机运行过程中得到实时结果。
多中间状态机包括5个状态:nocar、car、count0、count00以及count1.输入为u(k),中间状态为count0、count00,输出为car、nocar.
首先,将磁阻传感器HMC1022检测到的信号通过平均处理算法处理后得到f(k),再将f(k)转换为二值化信号u(k)作为状态机输入,并设定阀值T(k),当f(k)≥T(k)时,u(k)=1,当f(k)《T(k)时,u(k)=0.状态机中的有车计数器count1、干扰计数器count0和车辆离开计数器count00分别设置有一个计数器,并设定其阀值分别为N、M、M,当计数小于M时为干扰,大于M时表示车辆离开,此时为避免由于外界磁场环境变化或磁阻传感器温度变化引起输出信号漂移,将所有计数器的值均置0.改进后的状态机算法如图4所示。
与单中间状态机算法相比,多中间状态机算法不仅可以判断车辆何时进入检测区,而且增加了判断车辆离开检测器的中间状态,能够更好地从时间序列中提取车辆信息,因此,能有效避免由于干扰造成的误判。
5.测试与结论
本检测系统的实验结果是在道路现场进行实地测试得到的。根据检测点安放位置不同、传感器敏感轴的安置方向不同等多种情况分别进行测试,采集相应磁场信号变化信息,并进行分类对比与分析。
检测节点A和检测节点B分别安置于车道中央和车道边缘,车辆行驶方向为从西至东,如图2所示。改变磁阻传感器敏感轴X轴的方向,以X轴正方向为标志,使其分别朝向东、西、南、北方位,测试来车时该检测节点的磁场变化。
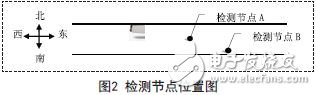
对比分析检测节点A和检测节点B的测试波形,可发现当车辆从检测节点上方通过时,检测值有着明显的变化,而车辆从检测节点旁边通过时,检测值虽有变化,但不明显。根据此不同变化特征,可将检测节点安置于道路各车道中央,既可以精确地辨别该车道是否有车辆经过,又可以有效地防止旁边车道车辆经过时引起的干扰,避免误检现象发生。
6.结束语
实验证明,该车流量检测系统对车辆具有很好的检测效果,同时算法简单,运行速度快,适合应用于单片机上。检测系统具备传感器节点成本低、体积小、无须布线等特点,可广泛应用于智能交通领域的车辆检测。
- 12位串行A/D转换器MAX187的应用(10-06)
- AGC中频放大器设计(下)(10-07)
- 低功耗、3V工作电压、精度0.05% 的A/D变换器(10-09)
- PIC16C5X单片机睡眠状态的键唤醒方法(11-16)
- 用简化方法对高可用性系统中的电源进行数字化管理(10-02)
- 利用GM6801实现智能快速充电器设计(11-20)