不采用自适应算法的智能天线系统
一、引言
随着移动通信在中国的迅速普及,有限的通信频带已日趋拥挤.为了提高通信频带的利用率,人们已采用了多种信道复用方法:频分多址 (FDMA)、时分多址(TDMA)、码分多址(CDMA)等.但是它们扩展容量的能力并不是无限的.智能天线[1~6]从一个崭新的角度来研究通信扩容问题,它利用空间分集进行扩容,它可以和传统的复用技术相结合,最大限度地利用有限的频带资源,它还可以有效地解决干扰问题、扩大基站覆盖区域、减少辐射功率.
智能天线以扩容原理分可以分为两类:
1.软容量的扩容[1~3].如CDMA系统,在这类系统中,由于可用信道数足够多,系统的容量决定于系统的信噪比.智能天线可以提高系统的信噪比,对于给定的信噪比门限值,采用智能天线的系统可以容纳更多的用户,达到扩容的目的.
2.硬容量的扩容[4~6].如FDMA,TDMA等系统,在这类系统中智能天线利用其空间分集的能力,使空间角度不同的多个用户使用同一传统信道(频分信道、时分信道).硬容量扩容实际是将一个传统信道再分为若干个空分信道,从而成倍地提高系统容量.
智能天线以实现形式分类,也可分为两类:
1.自适应算法形成方向图.自适应算法通常以输出信号的信噪比最大作为目标函数,用迭代算法使系统信噪比最佳.
2. 等旁瓣针状波束方向图.它通过测向确定用户信号的到达方向(DOA),然后将等旁瓣方向图的主瓣指向用户方向,从而提高用户的信噪比.该方案中的 DOA检测是一个比较成熟的技术,已经有MUSIC[7],ESPRIT[8]等多种算法,900MHz移动通信频段的实验结果也已见报道[9].
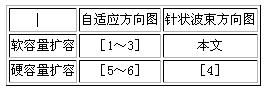
将智能天线按扩容原理、实现形式进行联合分类可得表1.已有的工作已对自适应软扩容、自适应硬扩容、针状波束方向图硬扩容进行了研究.本文将比照自适应软扩容智能天线,对针状波束软扩容智能天线进行研究.
二、自适应智能天线和针状波束智能天线
图 1是智能天线波束控制系统的原理框图.智能天线是一种阵列天线,所有智能天线系统都是通过改变阵列天线中各阵元信号的加权然后将其叠加,来完成信号的空间处理的.对于一个有N个单元的智能天线系统,处理每一个用户需要N个等效的加权器,若共有M个用户,则需N*M个等效加权器.在实际系统中,多个等效加权器的工作可由一个高性能的处理芯片完成,从而大大地减少系统的复杂程度.图1中给出的系统可以完成对一个用户信号的处理.智能天线的不同实现形式,主要体现图1框图的波束控制模块的实现形式上,下面将分别进行讨论.
图1 智能天线波束控制原理框图
自适应智能天线系统,通过迭代来获得一组加权矢量,从而使阵列输出信号S(t)中所需信号对所有其它用户信号的比最大,即信号干扰比最大.采用这种实现方式,系统具有最高的信干比.但是由于采用迭代方式,系统的响应速度受到限制.对于高速运动的移动用户,系统的性能也将受到影响.
迭代方式(1)
当加权信号已知时,阵列天线方向图可由式(1)算出.式中g(θ)为阵列方向图;ωm为第m路信号的加权值;φm(θ)是信号从空间角度到达阵列单元m时的相位差.
图2是一个阵元间距为半波长的8元圆形自适应阵列在1用户、10干扰用户的一种随机分布通信环境下对应的方向图.由图2可见,系统在干扰方向形成凹点,并在所需信号方向形成峰值.通常自适应算法在无干扰信号的其它角度上也可能出现峰值.
图2 自适应方向图
图 3是等旁瓣针状波束方向图,等旁瓣针状波束方向图也可由(1)式计算出.等旁瓣方向图与自适应方向图的不同在于加权信号产生的方式不同,等旁瓣方向图的加权值是预先计算好的.等旁瓣智能天线系统工作时,首先需要通过测向算法测定信号的到达角度(DOA),然后通过选取合适的加权,将方向图的主瓣指向用户到达方向.这类智能天线对于处于非主瓣区域的干扰,是通过低的等旁瓣电平来确保抑制的.对于处于主瓣区域内的干扰,采用等旁瓣针状智能天线系统将无法抑制. 由于系统方向图主瓣宽度是由天线阵列口径决定的,所以自适应智能天线对于主瓣内的干扰信号抑制能力也是很有限的.与自适应智能天线相比,等旁瓣智能天线无需迭代,响应速度快,而且这种方案的鲁棒性更好.
图3 -15dB等旁瓣针状波束方向图
三、智能天线系统对照仿真结果
本节分别给出了采用自适应方向图(Applebaum算法[11])、-10dB等旁瓣针状波束方向图(如图4虚线)、-15dB等旁瓣针状波束方向图(如图3)、-20dB等旁瓣针状波束方向图(如图4实线)的四种智能天线系统性能的仿真结果.仿真所用系统采用相邻阵元间距为半波长的8元圆形阵列,假设阵列采用各向同性单元.仿真时对于自适应智能天线不
- 基于智能天线技术的TD—SCDMA系统用研究(05-01)
- 基于3G MIMO技术的设计(06-14)
- 自适应多天线技术 (03-01)