确保EMC高性能:利用无扼流圈收发器简化CAN总线
虽然有很多不同的车内网络互连标准,并且汽车原始设备制造商 (OEM) 对于EMC也有多种不同的要求,这篇文章主要讨论一个已经被证明具有特别挑战性的话题:一个控制器局域网 (CAN) 总线的射频 (RF) 放射。
CAN使用均衡的差分信令来发送波特率,高达1Mbps(或者更高,前提是使用“灵活数据速率”变量)的二进制数据。理想情况下,差分信令的使用避免了所有外部噪声耦合。由于每一半差分对(被称为CANH和CANL)在变化时是对称的,它们的噪声带来的干扰是具有破坏性的。然而,没有CAN收发器是完全理想的,并且CANH和CANL信号之间的低值不对称会产生未经完全均衡的差分信号。当这一情况发生时,CAN信号的共模分量(CANH和 CANL的平均值)将不再是一个恒定的DC值。相反地,它将表现出与数据有关的噪声。
两个主要的不均衡类型会导致这个噪声。其中一个就是显性(被驱动)和隐性(高阻抗)状态期间稳定状态共模电压电平之间的不匹配。
这个稳定状态不匹配会导致一个类似于CAN数据本身缩放版本的噪声图形。这个噪声图形在它的频谱内很宽,表现为一系列延伸至极低频率且间隔均匀的离散频谱线。定时不匹配会导致一个由短脉冲或干扰组成的噪声图形,只要数据中有边缘变换,它就会出现。这个噪声图形的频谱含量往往集中比较高的频率上。
图1中的波形显示了一个可以在典型CAN收发器的输出上观察到的共模噪声。在这幅图像中,黑色轨迹线(通道1)显示CANH,紫色轨迹线(通道 2)显示的是CANL,并且绿色轨迹线(数据功能)是CANH与CANL的和。这个求和的过程给出了一个波形,它的值等于此时一个指定点上共模电压的2 倍。
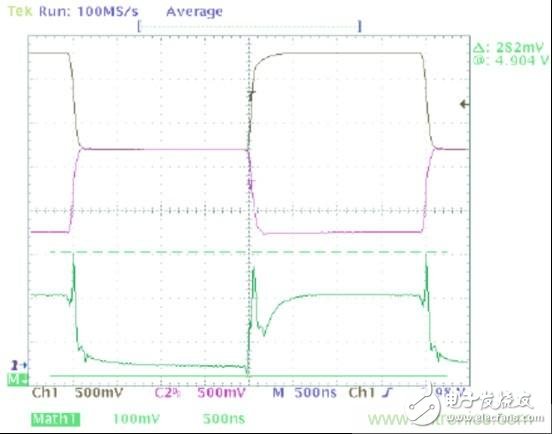
图1:典型CAN收发器CANH/CANL输出和共模噪声
共模波形显示出两种噪声类型:与显性至隐性/隐性至显性变换相对应的高频噪声,而低频噪声是与不匹配的显性和隐性共模相对应的。
由于信号的共模部分能够与系统(或与外部系统)中的其它分量耦合在一起(通过辐射或传导路径),这个共模噪声直接影响放射性能。这个器件的传导放射按照工业电气工程/电子 (IBEE) 茨维考技术的工程服务进行测量;如图2中所示,这个器件的传导放射连同一个普通汽车原始设备制造商(OEM)限值线一同绘制。
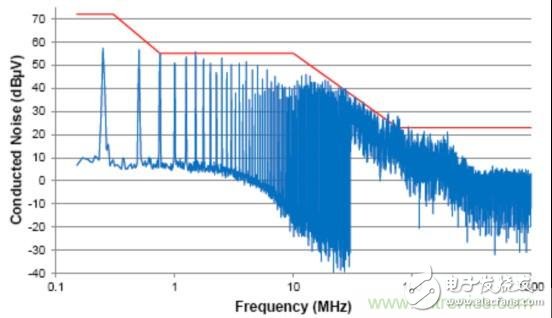
图2:一个典型CAN收发器的传导放射
这个收发器的输出放射超过了低频和高频区域内的OEM要求。为了把放射降低到令人满意的水平,必须使用某些外部滤波。
CAN总线中最常用的滤波器组件就是共模扼流圈(如图3中所示)。共模扼流圈的构成方式是将两个线圈绕在同一个铁芯上。在每个线圈绕组方向的安排方面,要使得共模电流(也就是说,每个线圈内的电流方向一致)具有共用同一极性的磁通量。这使得共模扼流圈可以运行为针对共模信号的电感器,从而提供一个随上升的频率而增加的阻抗。相反地,差分模式电流(也就是说,每个线圈内的电流方向相反)将使它们的磁通量与反向极性相互作用。对于诸如CAN信号的均衡波形,每个线圈内相反磁通量的幅度将会相等,因此不会在铁芯内累积静磁通。这使得扼流圈运行为一个针对CAN信号的短接电路。
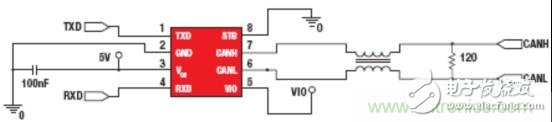
图3:共模扼流圈电路原理图
这项技术在减少CAN总线放射方面十分有效。例如,当用一个51μH共模扼流圈对上面不能满足放射要求的器件进行重新测试时,性能得到极大提升(图4)。
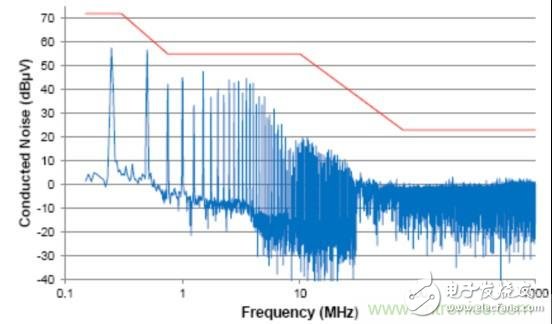
图4:典型CAN收发器(具有共模扼流圈)的传导放射
然而,在添加共模扼流圈时会带来一些缺点。使用共模扼流圈时的一个明显劣势就是印刷电路板上需要额外的空间,并且会产生多余的物料清单成本。不过,除此之外,还应该考虑某些对CAN总线的细微影响。由于扼流圈线圈会引入某些串联电感,当这个电感与CAN网络的寄生电容组合在一起时会生成谐振。尽管在大多数频带内减少了共模噪声,这些谐振会在谐振频率上导致噪声数量增加。可以在图5中所示的共模噪声波形中观察到这个影响。
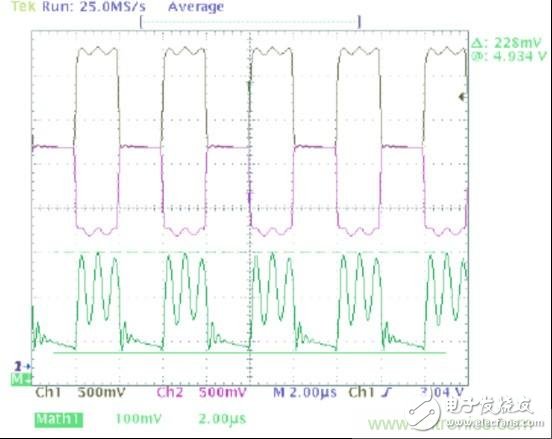
图5:由扼流圈电感导致的共模噪声
这个窄带噪声特别难管理。它的幅度往往很强,并且,由于扼流圈电感和总线电容的变化,其频率也会随着系统的不同而发生变化。需要注意的是,一个共模扼流圈的电感值通常在较宽的公差范围内指定(比如说标称值的-30%到50%)。相似地,一个CAN网络的总线电容将根据所使用电缆连接的类型和长度、网络中的节点数量和每个节点
- 电磁兼容EMC预测试与鉴定测试(09-25)
- EMC常见缩略语清单(03-19)
- EMC(电磁兼容性标准)认证流程图(02-11)
- 基于仿真软件的系统EMC设计(01-03)
- 关于照明光源频闪的问题(03-01)
- 基于仿真软件的系统EMC设计之工程实例(01-12)