前途广阔的MEMS-IMU
ADIS16488惯性测量单元高精度MEMS-IMU:加速度计量程范围比较宽1g~5000g,分辨率要0.1mg~1mg范围内,甚至更高。陀螺仪量程要求范围宽20°/s~1000°/s,频率响应高,要求在50Hz~1000Hz之间,零偏稳定性在1°/h~50°/h范围内。如今MEMS-IMU正在向更高集成度和更高精度的方向发展。其中MEMS陀螺仪的发展极为明显,其性能也在接近或者已经达到战术级应用的水平;而MEMS加速度计是商业市场化最为成功的,其精度已经能够满足战略导弹的应用要求,但目前MEMS加速度计的精度水平还不是很高。MEMS惯性器件在结构设计、制作工艺、集成化、电路设计、封装及试验系统等方面还存在许多的问题,需要进一步解决。MEMS惯性传感器的研究热点和发展方向是精度高、环境适应能力强和多传感器集成化等,其中MEMS惯性传感器件的设计和制造元器件所需的生产工具也是一个重要的研究方向。IMU简介IMU,惯性测量单元,是一种使用加速度计和陀螺仪来测量物体三轴姿态角(或角速率)以及加速度的装置。狭义上,一个IMU 内在正交的三轴上安装陀螺仪和加速度计,共 6 个自由度,来测量物体在三维空间中的角速度和加速度,这就是我们熟知的"6轴IMU";广义上,IMU可在加速度计和陀螺仪的基础上加入磁力计,可形成如今已被大众知晓的"9轴IMU"。其中加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。IMU在导航中的核心价值无可替代,为了提高其可靠性,还可以为每个单轴配备更多种类的传感器。为保证测量准确性,一般IMU要安装在被测物体的重心上。
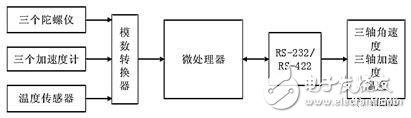
一种IMU原理示意图影响IMU性能的主要因素

MEMS-IMU主要误差源将IMU的误差源归类后主要有以下四类:(1)加速度计影响因素在IMU中,加速度计对其的影响主要体现在加速度计的精度和稳定性两个方面。其中加速度计的高精度是为保障后续数据处理的精确性,加速度计的稳定性则是直接影响IMU能否发挥出正常性能的关键因素。其中加速度计精度可采用6位置静态标定法。将IMU器件安装完毕后,按照下图的六个位置分别收集三个方向加速度计的数据。
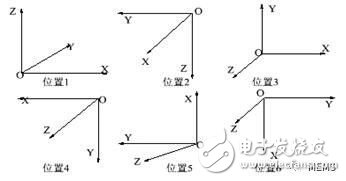
加速度计静态六位置(2)陀螺仪影响因素陀螺仪对IMU的影响主要体现在其精确性上,其精确性将直接影响姿态解算的优劣程度,换句话说,最后IMU能否正确感知产品的姿态就是依靠陀螺仪的精确性。陀螺仪误差模型与加速度计类似,采用的标定方法是动态旋转的,将IMU置于单轴转台中,令每个轴向上、向下,并分别以50°/s、100°/s、150°/s、200°/s、250°/s的转速转动正反方向,并收集足够的数据。

陀螺仪的动态标定除精确性外,MEMS陀螺的性能指标主要有:标度因数(与比例因子互为倒数)、标度因数非线性、零偏、零偏稳定性、零偏重复性。这些指标系统的反映了陀螺仪的性能,因此有必要对其进行相应的测试,掌握其具体的指标参数。(3)温度影响因素MEMS惯性器件在温度发生变化时,其精度会产生较大的差异,一般情况下,惯性器件的工作环境不可能是恒温环境,尤其是陀螺的精度受到严重影响,因此温度的影响不能忽略,以陀螺仪为例,置放惯性器件于恒温转台中试验,并在不同温度下收集数据。

微惯性器件的温度试验(4)IMU产品化后主要影响因素A.信噪比低信噪比低会造成使用IMU的产品不敏感,因此最棘手的问题便是降噪。一般此种情况可利用小波降噪,对信号进行消噪实际上是抑制信号中的无用部分,增强信号中的有用部分的过程。惯性器件常用的消噪过程为:a. 信号的小波分解,选择一个合适的小波并确定分解的层次,然后进行分解计算;b. 小波分解高频系数的阈值量化,对各个分解尺度下的高频系数选择一个阈值进行软阈值量化处理;c. 小波重构,根据小波分解的最底层低频系数和各层分解的高频系数进行一维小波重构。其中最关键的是如何选择阈值以及进行阈值量化处理,它直接关系信号消噪的质量。B.漂移大/延迟大对于信号延迟问题,MEMS的常用器件都有存在,在IMU产品中极为明显。国外研究机构提出利用惯性误差旋转调制技术,来解决延迟问题。惯性误差旋转调制技术实质上是一种误差自补偿技术,利用IMU周期性转动完成对惯性器件慢变误差的调制,是在现有器件精度的条件下实现更高导航精度的有效方法。采用误差调制技术的惯性导航系统结构发生了变化,旋转机构的存在导致陀螺仪和加速度计与载体不再固连,但解算依然采用捷联算法,因此这种惯性导航
IMU 相关文章:
- 正弦稳态电路的MATLAB/simulink仿真分析(08-02)
- OPTIMUS应用于电动机控制系统优化技术(05-26)
- 专家支招:使用MATLAB和Simulink算法创建FPGA原型(02-28)
- system generator入门笔记(02-11)
- 如何利用工业级IMU减少正交误差的影响(07-29)