设计干货精选:AVR单片机工业控制方案合集
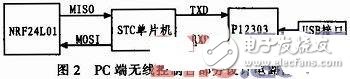
PI串行通信协议配置NRF24L01的相关寄存器,随后芯片进入发射模式,将上位机指令转发给下位机。其设计电路图如图2所示。
2.2下位机无人车控制部分
硬件设计下位机硬件由MCU模块、电机驱动模块、传感器模块、无线模块、语音模块、LED生命值显示模块以及电源模块组成。
2.2.1 MCU模块
MCU模块以Atmega128单片机为核心,Atmega128单片机是一款高性能、低功耗的AVR 8位微处理器,处理速度可达1 MIPS/MHz,应用先进的RISC结构,特别是具有I2C、SPI、PWM、RS232串口、ADC、定时器等功能十分全面的外设。该单片机通过 SPI串行通讯接口与无线模块连接,通过通用可编程I/O接口与电机驱动模块、语音模块、红外发射管和接收管连接。
2.2.2电机驱动模块
电机驱动模块用于驱动直流电机,采用L298P电机驱动芯片。L298P是SGS公司的产品,为20管脚的专用电机驱动芯片,内含二个H—Bridge的高电压、大电流双全桥式驱动器,接收标准TTL逻辑准位信号,可驱动46 V、2 A以下的步进电机和直流电机,具有高电压、高电流的特点。电路设计如图3所示。
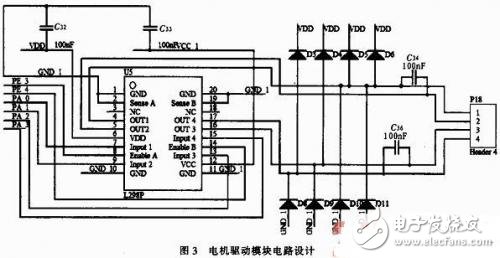
Enable控制电机停转,接到单片机的PE3、PFA口上,由这两个I/O口产生PWM波控制电机转动。input1—input4控制电机的正反转,接到单片机的PA0-PA3口上。OUT1、OUT2和OUT3、OUT4之间分别接2个直流电机。
2.2.3传感器模块
传感器模块包括红外模块和霍尔模块两部分。
红外模块包含接收和发射两个功能模块。红外接收模块由一个红外接收管构成,接收对方车辆发射的红外攻击信号。当系统接收到进攻信号时,PE6引脚上会出现一个高电平,触发一次外部中断,在中断服务程序中处理并判断红外数据。如果确认为进攻信号,则使生命值变量减一,同时熄灭一个LED灯。发射模块由一只红外发射管和一个三极管组成,红外攻击信号经过三极管放大后由红外发射管发出。攻击信号为8位数据,当收到进攻指令时,发射模块将程序中设定好的8位数据按位发出。
霍尔模块由两只霍尔传感器和四片磁铁组成,用于测速,以实现调速、自动行驶等功能。磁铁正反安放在左右两个电机减速箱的二级齿轮的边缘上。当教学无人车行驶时,电机带动齿轮转动,两片磁铁就会交替从霍尔元件下面经过,由于两片的磁场方向不同,就会使霍尔元件内部的电子发生不同的偏转,这样,二级齿轮每转过一周就会使霍尔元件产生一个脉冲信号,构成闭环系统。主控芯片接收脉冲信息,通过不同算法可控制两电机完成不同的控制要求。
2.2.4语音模块
语音模块由WT588D语音芯片和SPI寻址的8M ROM芯片及其外围电路组成。使用前将需要播放的语音烧写在ROM芯片中。语音模块使用三线串口控制模式,这种控制模式由CS,DATA,CLK 3条通信线组成,分别连接到Atmega128的PC0、PC1、PC2 3个I/O口。控制时序根据标准SPI通信方式。
2.2.5无线模块
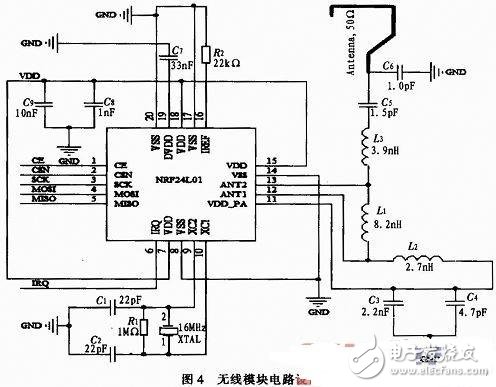
无线模块主要包括NRF24L01和Atmega128.NRF24L01采用FSK调制,内部集成NORDIC公司自家的Enhanced Short Burst协议,可实现点对点或是1对6的无线通信,无线通信速度可达2.4 Gbps,并可以通过配置其寄存器实现调频传输。主控芯片通过SPI协议配置NRF24L01的相关寄存器来完成对无线模块的初始化和数据的传输。无线模块的SPI信号线对应的接到Atmega128的PB0-PB3 4个I/O口上,CE端接到PE2,利用Atmega128内部集成的SPI功能进行通信。无线模块电路设计如图4所示。
3软件设计
软件设计包括控制端软件的设计和终端软件的设计。
3.1控制端软件设计
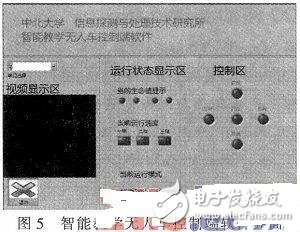
无人车控制台的主控软件将键盘指令转化为控制码发往下位机,控制小车的动作并显示下位机发来的状态信息???。该软件利用Labview串口通讯将键盘指令转化为二进制字符串送到上位机。利用模拟SPI的方式,通过STC12LESA60S2配置NRF24L01的寄存器使其处于发射模式。当收到PC串口发送的数据时,NRF24L01在单片机的控制下将数据逐位发出。设计的控制端软件如图5所示。
3.2终端软件设计
教学无人车的终端软件主要包括无线接收程序、驱动控制程序等。程序中定义变量Life为生命值标识,定义Date为小车的控制标识,定义函数Motor()为电机控制函数。流程图如图6所示,主要分为以下步骤:
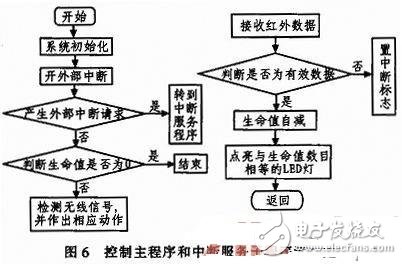
1)小车启动后,首先初始化各I/O口、系统中断、SPI接口以及NRF24L01的相关寄存器。小车的无线模块配置为接收模式。
2)下位机接收到无线信号后会产生一个中断,将数据通过SPI送到Atmega128中。在控制程序中,用多分支选择结构switch—case判断Date的值,通过调用Motor()函数控制电机做出相应动作
- 下一代Flash存储器在工业控制领域技术与应用(02-05)
- 应对电机设计,安森美有何发展趋势及创新方案?(03-26)
- 以太网标准与驱动系统设计(04-20)
- 飞思卡尔最新工业机器人解决方案特点及优点分析(07-22)
- MCP8063三相正弦无传感器无刷电机工业控制驱动方案(07-04)
- 多种工业触摸屏的原理及特性解析(07-18)