浅析无刷直流电机,无刷直流电机的工作原理及其结构构成
无刷直流电机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机。早在十九纪诞生电机的时候,产生的实用性电机就是无刷形式,即交流鼠笼式异步电动机,这种电动机得到了广泛的应用。但是,异步电动机有许多无法克服的缺陷,以致电机技术发展缓慢。上世纪中叶诞生了晶体管,因而采用晶体管换向电路代替电刷与换向器的直流无刷电机就应运而生了。这种新型无刷电机称为电子换向式直流电机,它克服了第一代无刷电机的缺陷。
本文要介绍电机种类中发展快速且应用广泛的无刷直流电机(以下简称BLDC)。BLDC被广泛的用于日常生活用具、汽车工业、航空、消费电子、医学电子、工业自动化等装置和仪表。 顾名思义,BLDC不使用机械结构的换向电刷而直接使用电子换向器,在使用中BLDC相比有刷电机有许多的优点。
BLDC(无刷直流电机)的结构
直流无刷电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(p)影响:
n=60.f / p。在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。直流无刷电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。也就是说直流无刷电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
直流无刷驱动器包括电源部及控制部:电源部提供三相电源给电机,控制部则依需求转换输入电源频率。
电源部可以直接以直流电输入(一般为24v)或以交流电输入(110v/220 v),如果输入是交流电就得先经转换器转成直流。不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器转成3相电压来驱动电机。换流器一般由6个功率晶体管(q1~q6)分为上臂(q1、q3、q5)/下臂(q2、q4、q6)连接电机作为控制流经电机线圈的开关。控制部则提供pwm(脉冲宽度调制)决定功率晶体管开关频度及换流器换相的时机。直流无刷电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器,做为速度之闭回路控制,同时也做为相序控制的依据。但这只是用来做为速度控制并不能拿来做为定位控制。
1、定子
BLDC定子是由许多硅钢片经过叠压和轴向冲压而成,每个冲槽内都有一定的线圈组成了绕组,可以参见下图。从传统意义上讲,BLDC的定子和感应电机的定子有点类似,不过在定子绕组的分布上有一定的差别。大多数的BLDC定子有3个呈星行排列的绕组,每个绕组又由许多内部结合的钢片按照一定的方式组成,偶数个绕组分布在定子的周围组成了偶数个磁极。

图2.1.1. BLDC内部结构
BLDC的定子绕组可以分为梯形和正弦两种绕组,它们的根本区别在于由于绕组的不同连接方式使它们产生的反电动势(反电动势的相关介绍请参加EMF一节)不同,分别呈现梯形和正弦波形,故用此命名了。梯形和正弦绕组产生的反电动势的波形图如下图。
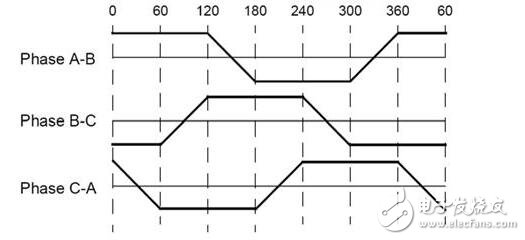
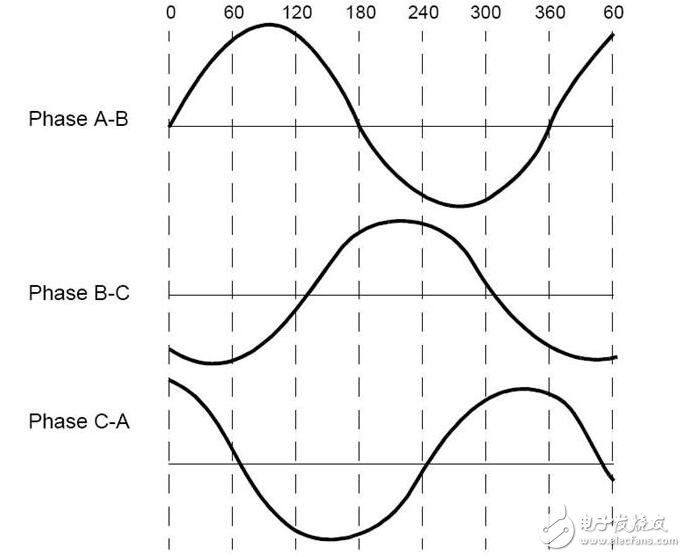
另外还需要对反电动势的一点说明就是绕组的不同其相电流也是呈现梯形和正弦波形,可想而知正弦绕组由于波形平滑所以运行起来相对梯形绕组来说就更平稳一些。但是,正弦型绕组由于有更多绕组使得其在铜线的使用上就相对梯形绕组要多。
平时由于应用电压的不同,我们可以根据需要选择不同电压范围的无刷电机。48V及其以下应用电压的电机可以用在汽车、机器人、小型机械臂等方面。100V及其以上电压范围的电机可以用在专用器具、自动控制以及工业生产领域。
2、转子
定子是2至8对永磁体按照N极和S极交替排列在转子周围构成的(内转子型),如果是外转子型BLDC那么就是贴在转子内壁咯。如图2.2.1所示;
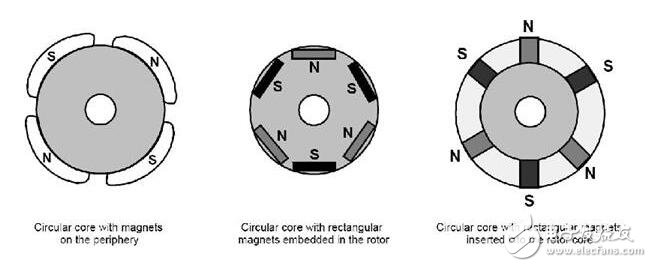
图2.2.1 转子磁极排布
3、霍尔传感器
与有刷直流电机不同,无刷直流电机使用电子方式换向。要使BLDC转起来,必须要按照一定的顺序给定子通电,那么我们就需要知道转子的位置以便按照通电次序给相应的定子线圈通电。定子的位置是由嵌入到定子的霍尔传感器感知的。通常会安排3个霍尔传感器在转子的旋转路径周围。无论何时,只要转子的磁极掠过霍尔元件时,根据转子当前磁极的极性霍尔元件会输出对应的高或低电平,这样只要根据3个霍尔元件产生的电平的时序就可以判断当前转子的位置,并相应的对定子绕组进行通电。
霍尔效应:当通电导体处于磁场中,由于磁场的作用力使得导体内的电荷会向导体的一
- 针对白家电应用的无刷直流电机驱动及控制方案(04-06)
- 简化三相无刷直流电机控制和驱动系统的策略(10-11)
- 无刷直流电机高精度采样保护电路设计(11-24)
- 无刷直流电机的控制策略与无刷直流电机仿人智能系统设计(05-19)
- 无刷直流电机的特点特性、选用选型及其应用(05-19)
- 德州仪器无刷直流电机控制方案(04-12)