单片机控制步进电机设计及失步原因分析,51单片机驱动步进电机的方法
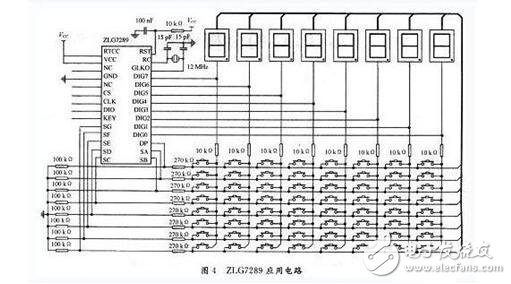
单片即可完成显示、键盘接口的全部功能。采用串行方式与微处理器通信,数据从DIO引脚送入芯片,并由CLK端同步。当选信号变为低电平后,DIO引脚上的数据在CLK引脚的上升沿被写入 ZLG7289A的缓冲寄存器。图4是ZLG7289的典型应用。ZLG7289A连接共阴式数码管,应用中不需要的数码管与键盘可以不连接,省去数码管或对数码管设置消隐属性,这均不会影响键盘的使用。整个电路无需添加锁存器和驱动器,耗电少,软件设计中无需编写显示译码程序,省去了静态显示扩展芯片,大大节省了CPU的时间。该电路设计中仅采用4&TImes;4键盘和4位数码管,已完全满足设计需要。
3、软件设计
软件部分采用模块化结构设计。对步进电机转速的控制是通过定时器工作在中断方式实现的。定时器定时中断产生周期性脉冲序列,不是采用软件延时的方式,这样不占用CPU的时间。CPU在非中断时间内可以处理其他事件,只有在中断发生时才驱动步进电机转动一步。根据步进电机励磁状态转换,采用查表法求出所需的输出状态,并以二进制码的形式依次存入单片机内部的存储器中;然后按照正向或反向顺序依次取出地址的状态字,送给STC12C4052AD,输出各励磁状态,从而实现环形分配器的功能。
程序总体框架包括:主程序、过流检测中断服务子程序、定时器中断服务子程序、以及其他子程序(包括正转、反转子程序、键盘显示控制子程序、A/D转换子程序等),由于篇幅限制,在此不一一叙述。
4、系统测试
该系统采用超强抗干扰,小巧低功耗的工业级STC12C4052AD单片机为控制核心,工作可靠性高,抗于扰能力强。系统测试在专门的检测实验室内进行。利用群脉冲发生器(EFT-4001)、周波电压跌落发生器(VDG-1105)、静电放电发生器(ESD-20)以及雷击浪涌发生器(SG-5006) 等专用仪器对系统的电压变化抗扰度、快速瞬变脉冲群抗扰度、抗静电和雷击浪涌等参数进行检测。经过实验,系统功能正常,所有参数均已达标。

电子技术发展日新月异,新型单片机层出不穷。在电机控制系统开发过程中,如果恰当选取单片机以及各电路模块的型号,能够简化设计过程,起到事半功倍的效果。该系统采用STC12C4052AD单片机,其工作方式、转动速率及转矩数可以通过键盘输入,也可通过普通旋钮或上位机调节。键盘显示模块采用 ZLG7289实现。本系统具有通用性,适当改变输出口各位控制端,便可控制不同相数的步进电机。
单片机控制步进电机的失步原因分析
单片机控制步进电机易出现失步、低频振动及易受外界电磁干扰而影响步进电机的正常工作,从步进电机本身的特性和控制驱动系统等方面分析了问题出现的原因,从控制驱动系统电磁干扰方面来讲步进电机运行时的不稳定主要受两个方面的影响,一是步进电机本身的机械特性所致,另一方面是控制驱动系统本身受外界环境因素和程序结构等方面产生的影响。
步进电机运行时存在的低频振动即转子的振荡现象,会引起齿轮碰撞,产生噪声!这种噪声是步进电机的固有特性造成的;同时步进电机还存在谐振点,当转子转速达到其机械谐振点时就会产生谐振和噪声;另外步进电机在高频启动和停止时也会因为强烈的冲击产生振动和噪声。
电磁干扰将有可能使单片机控制系统工作发生紊乱,使单片机产生误动作甚至死机等,严重影响步进电机运行的稳定性。单片机控制步进电机的驱动系统产生电磁干扰的干扰源主要来自外部电源、内部电源、印制板自制干扰、空中周围电磁场干扰、外部干扰信号可以通过公共导线、电容、相邻导线的互感以及空间辐射等途径从干扰源耦合到敏感元件上。
驱动系统中影响比较突出的几个方面加以分析:
1、布线不合理。同一回路或不同回路间布线不合理时容易产生感生电动势,形成电磁干扰。
2、供电干扰。工作时,交流电网负载突变时产生幅值较大的瞬变电压波经由直流稳压电源进入电子控制回路,从而影响单片机供电电源的稳定。
3、单片机与步进电机驱动回路之间,驱动回路产生的干扰信号通过线路窜入单片机,使单片机产生误动作,从而导致步进电机出现多步或失步现象。
4、步进电机的电枢绕组通断频繁,当通电时,会产生较大的电压电流的梯度变化,导致磁场耦合,形成严重的电磁干扰。当电枢绕组断电时,线圈中的磁场突然消失会产生很高的瞬变电压窜入控制回路,对系统中其它电子装置产生相当大的电能冲击甚至损坏元件。

51单片机驱动步进电机的方法
驱动电压12V,步进角为 7.5度 。 一圈 360 度 , 需要 48 个脉冲完成!

该步进电机有6根引线,排列次序如
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 德州仪器步进电机控制方案(04-12)