步进电机驱动电路解析,步进电机驱动电路原理图、电路性能比较及电路实例
时间:05-09
来源:网络整理
点击:
波驱动由比较器、比较器后面的放大电路、L、C、R等电路形成。假设比较器的"3"端电位高于"2"端,它的输出为低电位。由三极管组成的放大电路截止,加到相绕组上的电压逐步衰减,流过R0上的电流和iR0也随之降低。经过一定时间后,"3"端电位低于"2"端。经比较器比较后,输出高电位。(http://www.diangon.com/版权所有)放大电路的输出电压升高。流过取样电阻R0上的电流以回路时间常数所决定的规律逐步上升,R0上的压降iR0也随之上升。当"3" 端电位再一次高于"2"端时,比较器的输出再次变低。如此循环,形成斩波输出。
驱动电路的另外3个输入端DO1、D02、D03受程序控制,用来决定步进电机的正反向旋转。正转时,以ABC→ABC→ABC→ABC→ABC→ABC→ABC→…方式工作;反转时,以ABC→ABC→ABC→ABC→ABC→ABC→ABC→…方式工作。
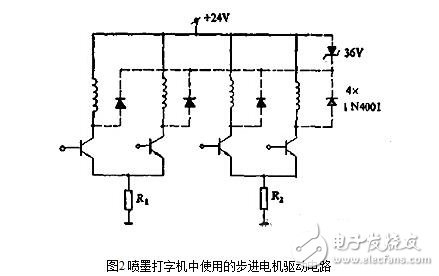
(2)图2是喷墨打字机中使用的驱动电路。被驱动的是四相步进电机,步距角为3.6°。驱动电路由四只二极管、四只晶体管、两组双线绕组、两只限流电阻和一只36V稳压管组成。稳压管以图示方式与二极管串联后,并联在线圈两端。这种方式与单纯并二极甘或并二极管-电阻相比,能在晶体管截止之后,使回路电流衰减得更迅速。除此之外,截止后,加在集电极上的最高电压是电源电压加稳压管的稳定电压,而与电流无关。在图示电路中,为60V。这使得决定最
大集电极电压的额定值变得很容易。图中的串联电阻主要是为了迅速建立激磁电流和改善转矩特性而设。设绕组电阻为Rw,串联电阻为R;则串联R后,电路的时间常数将从L/Rw减少为L/(Rw+R)。
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 德州仪器步进电机控制方案(04-12)