步进电机的技术参数、控制及其应用
电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。

2、步进电机动态指标及术语:
(1) 步距角精度: 步进电机每转过一个步距角的实际值与理论值的误差。用百分表示:误差/步距角*100%。不同运行拍数其值不同, 四拍运行时应在5%之内,八拍运行时应在15%以内。
(2) 失步: 电机运转时运转的步数,不等于理论上的步数。称之为失步。
(3) 失调角:转子齿轴线偏移定子齿轴线的角度,电机运转必存在失调角,由失调角产生的误差,采用细分驱动是不能解决的。
(4) 最大空载起动频率: 电机在某种驱动形式、电压及额定电流下,在不加负载的情况下,能够直接起动的最大频率。
(5) 最大空载的运行频率:电机在某种驱动形式,电压及额定电流下,电机不带负载的最高转速频率。
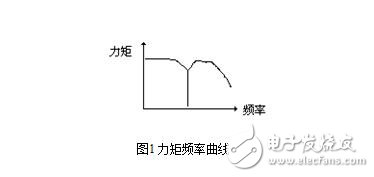
(6) 运行矩频特性:电机在某种测试条件下测得运行中输出力矩与频率关系的曲线称为运行矩特性,这是电机诸多动态曲线中最重要的,也是电机选择的根本依据。如下 图1所示:
(7) 电机的共振点:
步进电机均有固定的共振区域,二、四相感应子式步进电机的共振区一般在180-250pps之间(步距角1.8度)或在400pps左右(步距角为0.9度),电机驱动电压越高,电机电流越大,负载越轻,电机体积越小,则共振区向上偏移,反之亦然,为使电机输出电矩大,不失步和整个系统的噪音降低,一般工作点均应偏移共振区较多。
其它特性还有惯频特性、起动频率特性等。电机一旦选定,电机的静力矩确定而动态力矩却不然,电机的动态力矩取决于电机运行时的平均电流(而非静态流)平均电流越大,电机输出力矩越大,即电机的频率特性越硬。如下图2所示:
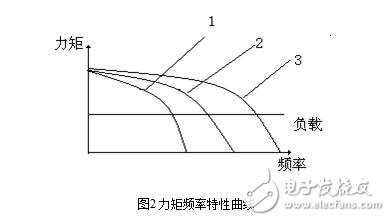
其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
步进电机的控制与应用
步进电机的开环控制
1、步进电机的硬件控制
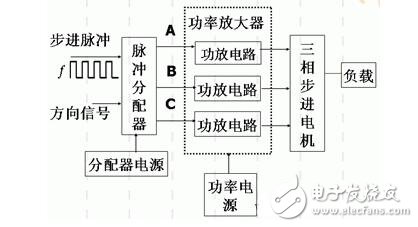
(1)脉冲分配器
当方向电平为低时,脉冲分配器的输出按A-B-C的顺序循环产生脉冲。
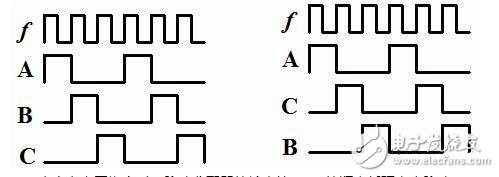
当方向电平为高时,脉冲分配器的输出按A-C-B的顺序循环产生脉冲。
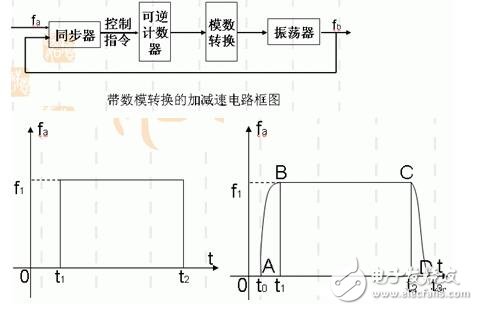
(2)加、减速控制:
(3)功率放大器
将脉冲分配器的输出信号进行电流放大后给电动机的定子绕组供电,使电动机的转子产生输出转矩。
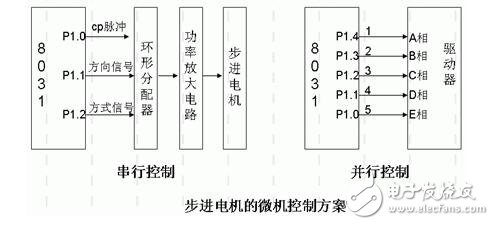
2.步进电机的微机控制:
目前,伺服系统的数字控制大都是采用硬件与软件相结合的控制方式,其中软件控制方式一般是利用微机实现的。这是因为基于微机实现的数字伺服控制器与模拟伺服控制器相比,具有下列优点:
(1)能明显地降低控制器硬件成本。速度更快、功能更新的新一代微处理机不断涌现,硬件费用会变得很便宜。体积小、重量轻、耗能少是它们的共同优点。
(2)可显著改善控制的可靠性。集成电路和大规模集成电路的平均无故障时(MTBF)大大长于分立元件电子电路。
(3)数字电路温度漂移小,也不存在参数的影响,稳定性好。
(4)硬件电路易标准化。在电路集成过程中采用了一些屏蔽措施,可以避免电力电子电路中过大的瞬态电流、电压引起的电磁干扰问题,因此可靠性比较高。
(5)采用微处理机的数字控制,使信息的双向传递能力大大增强,容易和上位系统机联运,可随时改变控制参数。
(6)可以设计适合于众多电力电子系统的统一硬件电路,其中软件可以模块化设计,拼装构成适用于各种应用对象的控制算法;以满足不同的用途。软件模块可以方便地增加、更改、删减,或者当实际系统变化时彻底更新。
(7)提高了信息存贮、监控、诊断以及分级控制的能力,使伺服系统更趋于智能化。
(8)随着微机芯片运算速度和存贮器容量的不断提高,性能优异但算法复杂的控制策略有了实现的基础。
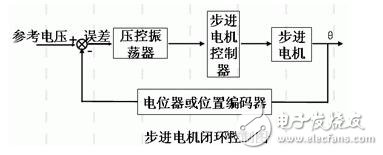
步进电机的闭环控制
- 便携式数字化焊缝底片检测仪硬件结构设计(06-27)
- 汽车动力系统LIN步进电机驱动器解决方案(03-14)
- LED三维显示系统设计方案(02-06)
- 步进电机驱动器的关键技术分析(05-11)
- 安森美半导体用于办公自动化设备应用的高能效步进电机驱动器方案(10-01)
- 德州仪器步进电机控制方案(04-12)