智能小车图像识别系统电路设计分析
时间:06-08
来源:网站整理
点击:
块,从而达到对小车行走方向及车速的控制。系统流程图如图5所示。
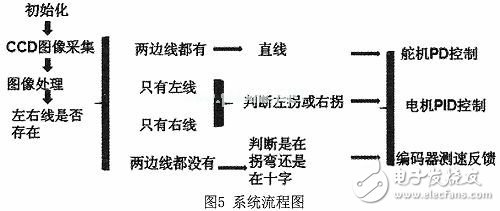
对于本项目智能小车系统的设计与开发,选用了MC9S12XS128高速单片机为控制核心,通过A/D转换方法获取TSL1401CL线性 CCD采集信息以及角度测量信息,运用模糊PID算法实现对车模直行、转向以及速度控制的方案。其中MC9S12XS128为整个系统信息处理和控制命令的核心,线性CCD传感器用来识别小车的运行路径,采集的信息在单片机上进行实时比较,通过PID控制算法来控制小车速度、转向,从而实现小车的智能自动驾驶。
编辑点评:智能小车装备了各种传感器来采集路况信息,通过计算机的控制可以实现自适应巡航,并且又快又稳、安全可靠。设计关键是路况信息的采集,传统的方案多采用红外光电传感器,此方案不仅噪声较大,而且与主控CPU的连接电路复杂,传输速率慢。本方案的优点是电路简单、系统性能稳定,经测试,本智能小车能在复杂的路况下实现智能自动驾驶。
- 基于线性CCD图像识别智能小车的设计与开发(05-11)
- 基于三次函数的电磁导航智能小车设计(09-24)
- 基于光学传感器的智能小车设计(10-13)
- 基于MSP430的智能小车寻迹模块设计方案(08-30)
- 基于AT89C52单片机的智能环保小车电路模块设计(10-11)
- 基于SPCE061A的智能小车机器人电路设计(10-18)