智能语音识别云台转动模块电路设计—电路图天天读(70)
基于单片机模块、LD3320语音识别模块和双自由度云台模块,设计了一种具备非特定人语音识别能力的智能语音控制系统—智能地球仪。该地球仪通过智能识别用户给出任一国家名称的命令驱动云台转动使地球仪上的目标国家正对用户,同时点亮代表该国家首都的LED灯,并播 放该国家的概况信息。此地球仪可应用于地理教学中,是一种性能可靠、功能强大、趣味性强的教学模具。
语音芯片LD3320 芯片是一款基于非特定人语音识别技术的声控芯片, 可以实现语音识别及MP3 播放功能。为了能使芯片正常工作,共有42 个引脚需要配置,而单独使用AT89S52 单片机无法直接完成对该芯片的配置。虽然采用扩展I/O 口的做法也能实现, 但是为了使整个系统更加稳定可靠地工作, 本文选用单片机STC10L08XE 作为系统的协MCU 来完成对LD3320 语音模块的控制。
云台转动电路
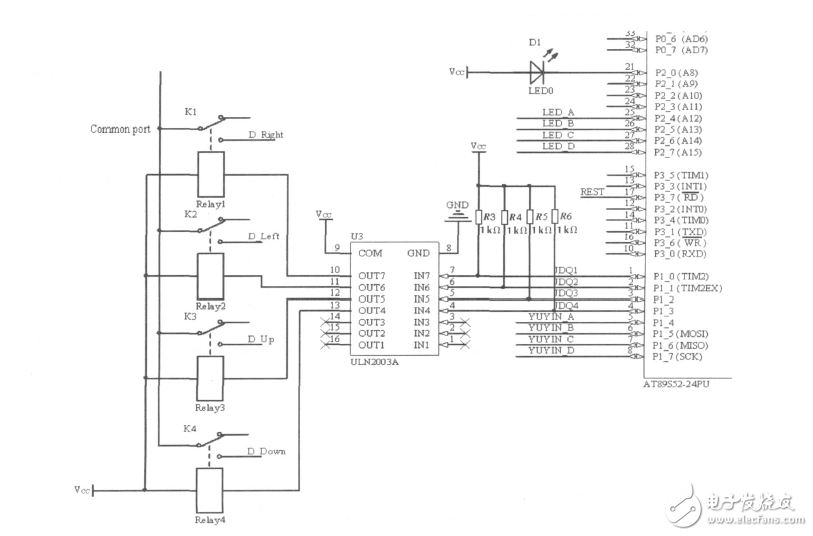
双自由度云台有4 个控制转动方向的端口, 分别是水平左转、水平右转、上升、下降, 需要24 V 的交流电来驱动, 而语音识别结果的二进制序列经过解码后由单片机AT89S52 的I/O 口输出, 其端口电平是0 ~5 V 的直流。为了能使单片机根据语音识别结果驱动云台转动,在AT89S52 和云台之间放置一个电流放大器件ULN2003 。ULN2003 是大电流、高耐压达林顿阵列, 包括7 个达林顿管, 在5 V 的工作电压下, 能够与TTL 和CMOS 电路直接相连, 这样就可以直接处理原来需要标准逻辑缓冲器来处理的数据。将控制云台转动方向的4 个端口D_Right 、D_Left 、D_Up 、D_Down 分别与继电器K1、K2、K3、K4 相连, 单片机AT89S52 根据解码后的语音识别结果控制继电器的断开和闭合, 从而控制云台转动的方向和角度。云台转动电路图如图所示。
语音识别播放电路
语音识别播放电路主要由语音芯片LD3320、STC10L08XE 单片机及其他外围电路构成。语音芯片LD3320 内部固化有完整的非特定人语音识别特征库和高效的非特定人语音识别搜索引擎模块, 不需要事先训练和录音。只需要单片机把候选识别语句的拼音串传入芯片内部, 通过芯片内部的DSP 算法, 找出最佳识别结果。同时此芯片还支持MP3 播放功能, 此时需要外接Flash 芯片, 用来存储播放的声音素材等数据。STC10L08XE 单片机读取串行存储芯片的MP3 数据, 依次送入LD3320 芯片内部就可以从芯片的相应引脚输出声音。STC10L08XE 单片机与语音芯片LD3320 之间采用并行的通信方式, 故在硬件上需要使用8 根数据线和4 个控制信号将语音芯片与单片机并行连接。
复位电路
为了保证智能地球仪在每次上电启动或复位操作后具有唯一确定的位置, 故需要为其设定起始转动位置。当云台转到初始位置时, 就给单片机AT89S52 发送一个判断信号, 表示复位完成, 可以开始语音识别。本设计中利用光电开关完成这一信号的给定。光电开关利用被检测物体对光束的遮挡或反射检测物体的有无, 一般包括发射部分和接收部分。发射部分由发光管辐射出光脉冲, 接收部分为光敏三极管。当没有物体遮住时, 光敏三极管导通, 电阻极小; 当有物体遮住时, 电阻极大[ 5]。系统设计中在云台平台侧面设置挡板, 初始位置固定光电开关, 当云台转至初始位置时, 挡板会正好停在光电开关中央, 使光电开关处于截止状态, 此时会给单片机一个信号( 低电平0 ) , 此信号接在AT89S52 单片机P3_7引脚。
电子发烧友网技术编辑点评分析:
本文采用低成本模块化设计, 使用单片机控制模块、语音识别模块及云台转动模块, 设计了一款能将用户的声控命令转化为国家地理位置的智能地球仪。该地球仪能智能识别任意用户说出的国家名称, 驱动云台转动使目标国家正对着用户, 点亮代表该国首都的彩色LED 指示灯, 并且语音播放该国的详细介绍, 包括人口、面积、现任领导人、地理、历史、气候、资源等。与其他智能地球仪相比, 该智能地球仪易于操作、趣味性强, 能充分激发学生的好奇心和求知欲。同时设计简单、成本低廉, 更适合在各学校普及使用。
大家如有问题,欢迎在评论处讨论。
——电子发烧友网整理,转载请注明出处!
- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)