一种新型智能车电机驱动电路设计
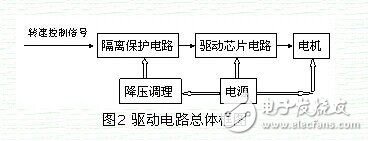
在机电控制系统中,大部分的控制信号是由微控制器输出的,如单片机、CPLD、DSP等。这些微控制器既要保证工作的稳定性,又要保证低功耗,所以这些控制芯片的工作电压都比较低,常见的是5V、3.3V、1.8V等,这些电压仅仅能够表示控制信号,不具有驱动较大功率负载的能力。由于本电路的目的是为了驱动智能车上的540电机,该电机具有大扭矩、大电流的特点,所以必须在控制信号和540电机之间增加驱动电路用来提高驱动能力,使单片机能够对电机进行控制。本文选择了BTS7960大电流低电压电机驱动芯片进行电路设计,设计的驱动电路总体框图如图2所示。
BTS7960是应用于电机驱动的大电流集成芯片。它由一个P沟道的高边MOSFET和一个N沟道的低边MOSFET结合一个集成的驱动IC形成了能经受大电流通过的H桥的半边。由于有了P沟道高边开关省去了电荷泵,因此减小了电磁干扰(EMI)。在BTS7960内部集成的驱动IC使得和微控制器的接口变得非常容易,并且具有逻辑电平输入、电流检测诊断、斜率校正、死区时间产生和过温、过压、欠压、过流及短路保护的功能。两块BTS7960能够进行连接构成H全桥。BTS7960通态电阻的典型值为16mΩ,驱动电流可达43A。
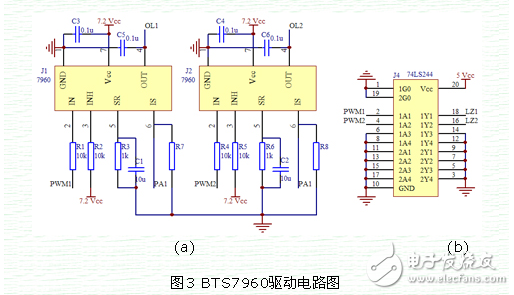
在智能车的比赛中,赛道是变化多样的,有直道、不同曲率的弯道和连续的S弯,所以电机工作在一个转速连续变化的状态。电机的加速减速可以通过单向的调节PWM波的占空比来实现。但是在比较复杂的情况下,电机需要进行电压反向的反接制动才能实现减速。比如从直到的高速行驶状态突然进入曲率很大的弯道,这时候仅仅靠停止单向的PWM波输出是不够的,还要进行反向PWM波的输出,所以电路的设计需要两块BTS7960构成H全桥来实现电机的正反转。设计的电路图如图所示。
- 盘点:那些为健康而生的APP与智能硬件(11-24)
- 指尖的密码!手指静脉识别鼠标问世(02-02)
- WLAN射频优化的解决方案设计详解(03-03)
- 智能鞋垫:解决跑步者的膝伤问题(02-12)
- 混合动力汽车系统结构大盘点TOP3(03-14)
- 盘点STM32-NUCLEO开发与仿真平台(03-28)