测试系统数字稳压电源设计方案
例、积分、微分控制器组合,将测量的受控对象(在本系统中为电压电流值)与设定值相比较,用这个误差来调节系统的响应,以达到动态实时的控制过程。
在数字稳压电源PID控制系统中,使用比例环节控制电压电流的输出与输入误差信号成比例改变,但是这里会存在一个稳态误差,即实际值与给定值间存在的偏差,因此需要引入积分环节来消除稳态误差以提高系统精度。但由于电源系统在导通、关断时,产生积分积累,会引起电压电流超调,甚至会出现震荡。为了减小这方面的影响,设定给定一个误差值范围,当电压电流与设定工作值的误差小于这一给定值时,采用积分环节去消除系统比例环节产生的稳态误差。PID控制算法设定阈值ε,当|e(k)|》ε时,采用PD控制环节,减少超调量,使系统有较快的响应;当|e(k)|《ε时,采用PID控制,以保证电压电流精度和稳定度。在电压达到千分之一精度范围后,需要加入积分环节,以完成电源开机时迅速稳定的输出。PID算法流程图如图3所示。
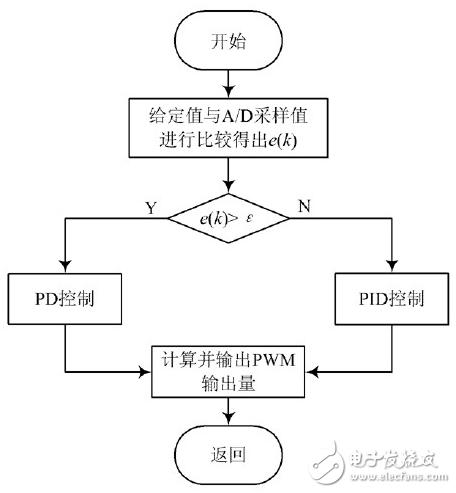
图3 PID控制算法流程图
PID控制算法程序采用结构体定义:
struct PID{
unsigned int SetPoint; //设定目标Desired Value
unsigned int ProporTIon; //比例常数ProporTIonal Const
unsigned int Integral; //积分常数Integral Const
unsigned int DerivaTIve; //微分常数Derivative Const
unsigned int LastError; //Error[-1]
unsigned int PrevError; //Error[-2]
unsigned int SumError; //Sums of Errors
}spid;
在PID控制算法中,经过不断与给定值进行比较,动态控制电压电流输出的稳定,同时确保电压电流输出的精度。
PID控制算法程序如下:
unsigned int PIDCalc(struct PID *pp,unsigned int Next-Point)
{
unsigned int dError,Error;
Error=pp-》SetPoint-NextPoint; //偏差
pp-》SumError+= Error; //积分
dError=pp-》LastError-pp-》PrevError; //当前微分
pp-》PrevError=pp-》LastError;
pp-》LastError= Error;
return(pp-》Proportion* Error //比例
+pp-》Integral*pp-》SumError //积分项
+pp-》Derivative*dError); //微分项
}
测试系统的整体程序流程图如图4所示。

图4 主程序流程图
本文所设计的测试系统数字稳压电源能够满足芯片测试所需的电源要求。图5为输出的一路电压。由图可知,所输出的电压稳定。

图5 输出电压波形图
4 结 语
本文设计的稳压电源提供的电压稳定可靠,系统运行也非常稳定。由于可扩展的I/O 非常多,可以同时为多个芯片提供各种所需的稳压电源电压值。该系统不仅能够用在实验室芯片测试工作中,而且可以通过软件编程的方法,修改一些控制程序,使所设计的稳压电源作为智能电子产品性能测试的电源电压,这样提高了设备的使用效率,有着不错的应用前景。
- 开关稳压电源助力农业自动化(07-15)
- 解析PWM开关稳压电源尖峰干扰(07-19)
- 基于SPWM的交流稳压电源设计方案(09-15)
- 节能型交流稳压电源设计方案(09-19)
- 简单的三端直流稳压电源制作(06-07)
- 直流稳压电源的技术指标(07-30)