机器人要如何实现辨别不同物体?
时间:06-04
来源:网络整理
点击:
随着生活水平提高,扫地机器人也是逐步进入每一个家庭中。但是扫地机器人使用也是有条件的,比如说有水的地方、台阶等处不适合使用扫地机器人,那么扫地机器人如何识别这些地方的呢?

产品线的反射式模组KIR9008C可以实现上述功能。KIR9008C是利用发送855nm波长的红外线去扫描被反射材质的表面,而红外线被反射回来被接收端接收,通过接收的红外线强度来判断被反射面材质。
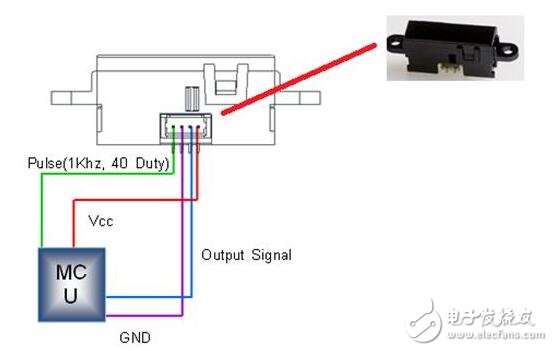
图1:KIR9008C的简单工作框图
扫地机器人主控MCU仅仅依靠1kHz的PWM脉冲来控制KIR9008C芯片,KIR9008C输出的电压值可以通过MCU的AD进行采集。KIR9008C优势在于很高的可靠性,电路简单,并且是模拟电压输出,可以根据电压值有效来判断材料。
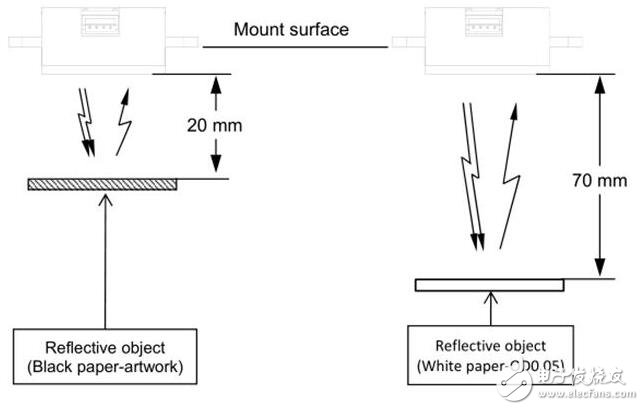
图2:KIR9008C在白纸和黑纸上检测距离
从图2可以看到KIR9008C对黑色材质的识别距离为20mm,而对白色材质的识别距离为70mm,这是因为白色材质对红外的吸收能力弱,大部分红外线被反射回来,而黑色材质对红外吸收能力强,当距离大于20mm时候,KIR9008C可能接收不到反射回来的红外线。
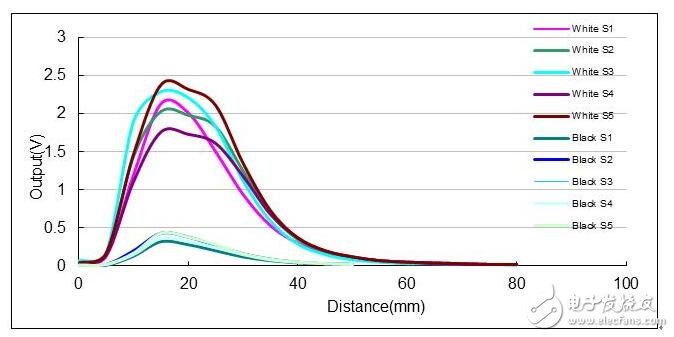
图3
从上图中,白色材质与黑色材质在不同距离下,KIR9008C的输出从0V到2.5V不等,说明材质与KIR9008C输出曲线唯一对应的。
在扫地机器人中,可以利用KIR9008C实现地面的工作状态的识别。因此,KIR9008C可以推广应用在地面检测,反射物体检测等项目中。
- 从1.8V到USB的多轨电压转换和管理(08-17)
- 管理多电压轨系统让数字电源管理变得简单(08-17)
- 一种用于D/A转换电路的带隙基准电压源的设计(09-15)
- 运算放大器组成阶梯波发生器电路图(10-11)
- 基于FPGA 的谐波电压源离散域建模与仿真(01-30)
- 电子工程师在其设计中所面临的难题(02-17)