磁电式传感器解析,磁电式传感器的原理结构及其应用
磁电式传感器是利用电磁感应原理,将输入运动速度变换成感应电势输出的传感器。它能把被测对象的机械能转换成易于测量的电信号,是一种无源传感器。磁电式传感器有时也称作电动式或感应式传感器, 它只适合进行动态测量。由于它有较大的输出功率,故配用电路较简单;零位及性能稳定。
磁电式传感器的原理结构
磁电式传感器有时也称作电动式或感应式传感器, 它只适合进行动态测量。由于它有较大的输出功率,故配用电路较简单;零位及性能稳定;
利用其逆转换效应可构成力(矩)发生器和电磁激振器等。根据电磁感应定律,当W匝线圈在均恒磁场内运动时,设穿过线圈的磁通为Φ,则线圈内的感应电势e与磁通变化率dΦ/dt有如下关系:
根据这一原理,可以设计成变磁通式和恒磁通式两种结构型式,构成测量线速度或角速度的磁电式传感器。下图所示为分别用于旋转角速度及振动速度测量的变磁通式结构。
变磁通式结构
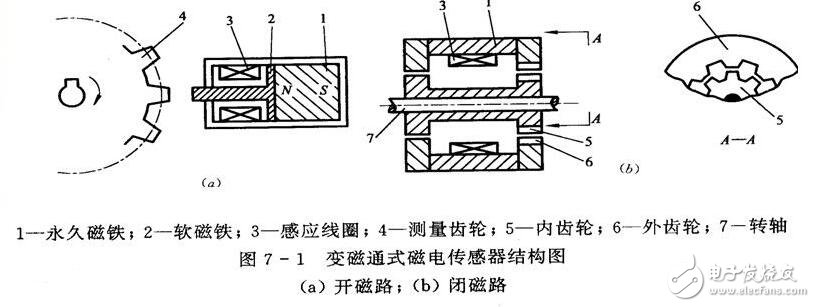
(a)旋转型(变磁)); (b)平移型(变气隙)
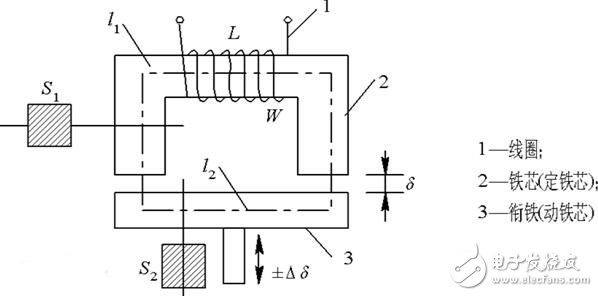
其中永久磁铁1(俗称"磁钢")与线圈4均固定,动铁心3(衔铁)的运动使气隙5和磁路磁阻变化,引起磁通变化而在线圈中产生感应电势,因此又称变磁阻式结构。
变磁式结构
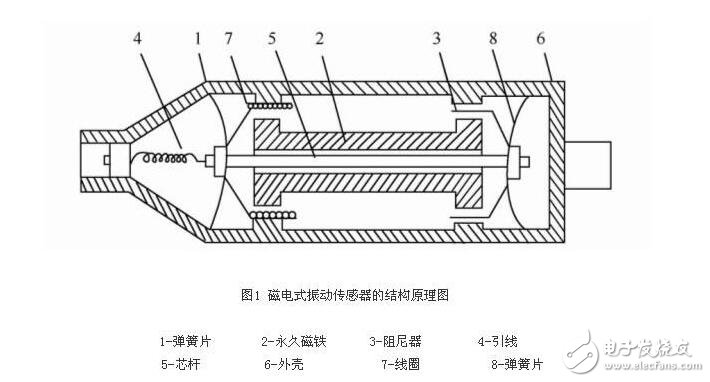
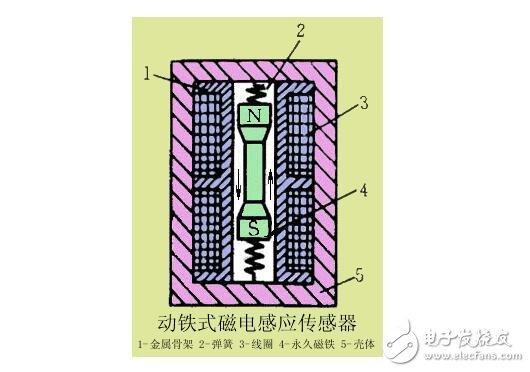
在恒磁通式结构中,工作气隙中的磁通恒定,感应电势是由于永久磁铁与线圈之间有相对运动——线圈切割磁力线而产生。这类结构有两种,如下图所示。
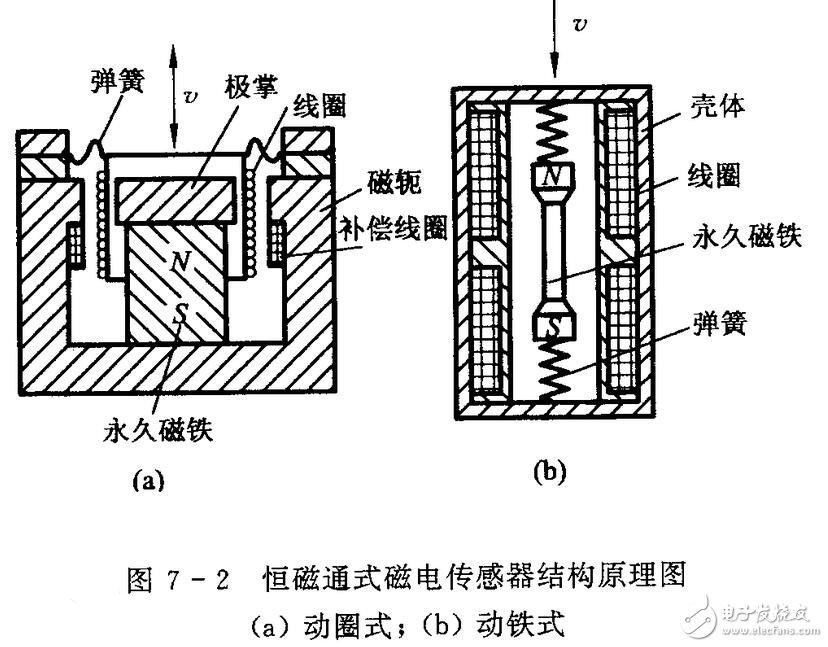
图中的磁路系统由圆柱形永久磁铁和极掌、圆筒形磁轭及空气隙组成。气隙中的磁场均匀分布,测量线圈绕在筒形骨架上,经膜片弹簧悬挂于气隙磁场中。
当线圈与磁铁间有相对运动时,线圈中产生的感应电势e为
式中 B——气隙磁通密度(T);
l——气隙磁场中有效匝数为W的线圈总长度(m)为l=laW(la为每匝线圈的平均长度)
v——线圈与磁铁沿轴线方向的相对运动速度(ms-1)。
当传感器的结构确定后,式(5-2)中B、la、W都为常数,感应电势e仅与相对速度v有关。传感器的灵敏度为
为提高灵敏度,应选用具有磁能积较大的永久磁铁和尽量小的气隙长度,以提高气隙磁通密度B;增加la和W也能提高灵敏度,但它们受到体积和重量、内电阻及工作频率等因素的限制。
为了保证传感器输出的线性度,要保证线圈始终在均匀磁场内运动。设计者的任务是选择合理的结构形式、材料和结构尺寸,以满足传感器基本性能要求。
各种磁电式传感器
1、磁电感应式传感器
(1) 磁电感应式传感器的特点
磁电感应式传感器简称感应式传感器,也称电动式传感器。它把被测物理量的变化转变为感应电动势,是一种机-电能量变换型传感器,不需要外部供电电源,电路简单,性能稳定,输出阻抗小,又具有一定的频率响应范围(一般为10~1000Hz),适用于振动、转速、扭矩等测量。其中惯性式传感器不需要静止的基座作为参考基准,它直接安装在振动体上进行测量,因而在地面振动测量及机载振动监视系统中获得了广泛的应用。但这种传感器的尺寸和重量都较大。

(2) 磁电感应式传感器的工作原理,分类与应用
工作原理:根据电磁感应定律,N匝线圈在磁场中运动切割磁力线,线圈内产生感应电动势e。e的大小与穿过线圈的磁通Φ变化率有关。按工作原理不同,磁电感应式传感器可分为恒定磁通式和变磁通式,即动圈式传感器和磁阻式传感器。
恒定磁通式磁电感应式传感器按运动部件的不同可分为动圈式和动铁式。动圈式磁电传感器的中线圈是运动部件,基本形式是速度传感器,能直接测量线速度或角速度,如果在其测量电路中接入积分电路或微分电路,那么还可以用来测量位移或加速;动铁式磁电感应式传感器的运动部件是铁芯,可用于各种振动和加速度的测量。
变磁通式磁电感应传感器中,线圈和磁铁都静止不动, 转动物体引起磁阻、磁通变化,常用来测量旋转物体的角速度。如动画所示,线圈3和磁铁5静止不动,测量齿轮1(导磁材料制成)每转过一个齿,传感器磁路磁阻变化一次,线圈3产生的感应电动势的变化频率等于测量齿轮1上齿轮的齿数和转速的乘积。变磁通式传感器对环境条件要求不高,能在-150~+90℃的温度下工作,不影响测量精度,也能在油、水雾、灰尘等条件下工作。但它的工作频率下限较高,约为50Hz,上限可达100Hz。

2、霍尔式传感器
(1) 霍尔传感器的特点
霍尔传感器也是一种磁电式传感器。它是利用霍尔元件基于霍尔效应原理而将被测量转换成电动势输出的一种传感器。由于霍尔元件在静止状态下,具
- 磁电式扭矩传感器如何测量_扭矩传感器计量标准器具(07-23)
- 能量收集器于所在环境产生电能,无线传感器无需使用电池(08-23)
- 针对能量收集型无线远程传感器网络的实用电源管理设计(11-29)
- 智能防窃电系统的设计(03-25)
- 一种无线传感器的能量收集的实现(08-31)
- 放电少、放置10年依然可用的锂亚硫酰氯电池(07-31)