机器人传感器的类别及应用原理
一般机器人系统由机械手、环境、任务和控制器四个互相作用的部分组成。我们称一般安装在机器人机械手上的传感器为内传感器(Inner Sensons),而称作为环境的一部分的传感器为外传感器(External Sensons)。下面将以此为主,结合机器人传感器其它分类方法进行阐述。
机器人产业近年来发展很快,2012年全球产量为16万台,欧、美、日等工业发达国家机器人市场已比较成熟,已处于平增长阶段。其机器人密度(万名员工使用机器人台数)韩国为347台,日本为339台,法国为261台,而我国为10台(有统计数据称为21台, 仅供参考)。而我国机器人市场也发展很快,工业机器人每年装机量增长速度均超过20%,2010年装机量为52290台,2011年上涨到74317台,实现了42%的增长率。在2012年,我国出台了《智能制造科技发展"十二五"专项规划》,2013年4月21日还成立了"中国机器人产业联盟",这些均证明了我国机器人产业将会有更大的发展。
机器人产品目前分类为工业机器人和服务机器人两大类。国内也有分为工业机器人和特种机器人两大类的;或分为一般机器人和智能机器人两大类;或分为一般机器人和移动机器人两类;或分为一般机器人和拟人机器人两类等。目前工业机器人多用于搬运、分拣、上下料、包装、码垛、焊接、喷涂、打磨、抛光、切割、摆放、装配等方面。
随着智能化的程度提高,机器人传感器应用越来越多。智能机器人主要有交互机器人、传感机器人和自主机器人3种。从拟人功能出发,视觉、力觉、触觉最为重要,早已进入实用阶段,听觉也有较大进展,其它还有嗅觉、味觉、滑觉等,对应有多种传感器,所以机器人传感产业也形成了生产和科研力量。
机器人的控制系统相当于人类大脑,执行机构相当于人类四肢,传感器相当于人类的五官。因此,要让机器人像人一样接收和处理外界信息,机器人传感器技术是机器人智能化的重要体现。
传感器是机器人完成感觉的必要手段,通过传感器的感觉作用,将机器人自身的相关特性或相关物体的特性转化为机器人执行某项功能时所需要的信息。根据传感器在机器人上应用的目的和使用范围不同,可分为内部传感器和外部传感器。
内部传感器用于检测机器人自身状态(如手臂间角度、机器人运动工程中的位置、速度和加速度等);外部传感器用于检测机器人所处的外部环境和对象状况等,如抓取对象的形状、空间位置、有没有障碍、物体是否滑落等。

机器人传感器主要类别:
内传感器
机器介机电一体化的产品,内传感器和电机、轴等机械部件或机械结构如手臂(Arm)、手腕(Wrist)等安装在一起,完成位置、速度、力度的测量,实现伺服控制。
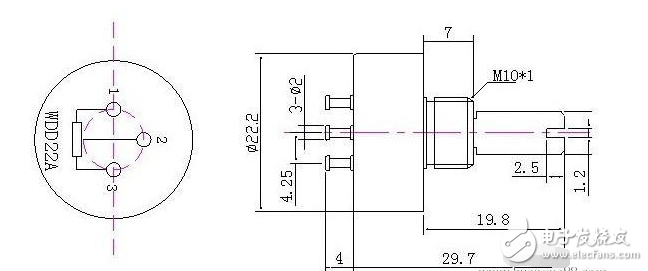
位置(位移)传感器
直线移动传感器有电位计式传感器和可调变压器两种。角位移传感器有电位计式、可调变压器(旋转变压器)及光电编码器三种,其中光电编码器有增量式编码器和绝对式编码器。增量式编码器一般用于零位不确定的位置伺服控制,绝对式编码器能够得到对应于编码器初始锁定位置的驱动轴瞬时角度值,当设备受到压力时,只要读出每个关节编码器的读数,就能够对伺服控制的给定值进行调整,以防止机器人启动时产生过剧烈的运动。
速度和加速度传感器
速度传感器有测量平移和旋转运动速度两种,但大多数情况下,只限于测量旋转速度。利用位移的导数,特别是光电方法让光照射旋转圆盘,检测出旋转频率和脉冲数目,以求出旋转角度, 及利用圆盘制成有缝隙,通过二个光电二极管辨别出角速度,即转速,这就是光电脉冲式转速传感器。
此外还有测速发电机用于测速等。
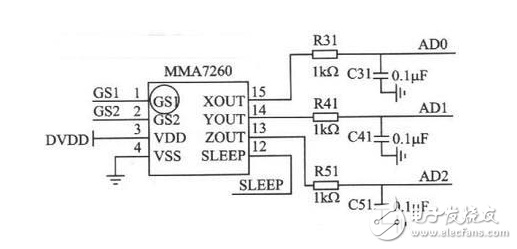
应变仪即伸缩测量仪,也是一种应力传感器,用于加速度测量。加速度传感器用于测量工业机器人的动态控制信号。一般有由速度测量进行推演、已知质量物体加速度所产生动力,即应用应变仪测量此力进行推演,还有就是下面所说的方法:
与被测加速度有关的力可由一个已知质量产生。这种力可以为电磁力或电动力,最终简化为对电流的测量,这就是伺服返回传感器,实际又能有多种振动式加速度传感器。
力觉传感器
力觉传感器用于测量两物体之间作用力的三个分量和力矩的三个分量。机器人中理想的传感器是粘接在依从部件的半导体应力计。具体有金属电阻型力觉传感器、半导体型力觉传感器、其它磁性压力式和利用弦振动原理制作的力觉传感器。
还有转矩传感器(如用光电传感器测量转矩)、腕力传感器(如国际斯坦福研究所的由6个小型差动变压器组成, 能测量作用于腕部X、Y和Z三个方向的动力及各轴动转矩)
- 意法半导体:工业机器人控制应用方案(02-15)
- 飞思卡尔最新工业机器人解决方案特点及优点分析(07-22)
- 颠覆你想象的高智能人形机器人大盘点(08-22)
- 走在行业最“潮”端的机器人大盘点(08-19)
- 机器人关键技术及前沿应用设计集锦(10-24)
- 工业机器人作业的四大特点(07-14)