裸机AMP(非对称多进程处理模式)
在上一篇博客中,我们已经将Zynq SoC启动并运行起来,在AMP(非对称多进程处理)模式下使用了两个ARM Cortex-A9 MPCore处理器,然而因为上一篇博客已经相当长了,我没有详细的介绍软件方面的工程细节。
其实 在两个处理器上运行的软件工程也非常的简单。这里我将为你们展示通过OCM(片上存储器件)实现Zynq SoC的两个处理器之间的通信。然而,现在的软件工程非常的简单,因此我们可以从这个基础工程开始,继续完善。
上周我们完成的例子中的软件工程主要完成以下几个任务:
Core 0 是主设备,它可以激活Core 1。它也利用了片上的UART串口以固定的延迟向一个终端输出打印信息。这个延迟不适用定时计数器等,尽管在这里使用私有的定时计数器很容易,我将在后面的博客中介绍同时使用两个私有的定时计数器。
一旦Core 0 启动起来,Core 1初始化它的私有资源,输出切换信号,控制位于MicroZed I/O扩展板上的八个LED灯亮灭,这里我们需要使用Core 1私有的定时计数器和通过GIC使能中断,实现以上功能。
这些应用程序之间是没有联系的,它们并不分享资源。然而,接下来我们想让这些应用程序之间能够通信,分享资源。
运行在 Core 0上的应用程序是非常简单的。它主要实现的是激活运行在Core 1上的应用程序,然后在一个无限循环中通过UART 0输出打印出一段简单的信息。

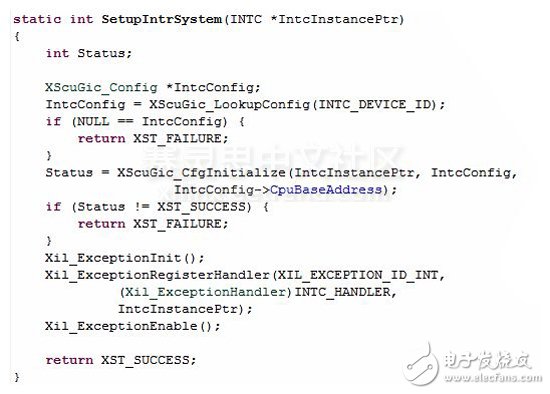
然而,我们计划使用Core 1的中断控制器,所以第一步我们必须配置GIC(通用中断控制器),将下图所示的代码加入到Core 0的应用程序的源代码文件中:
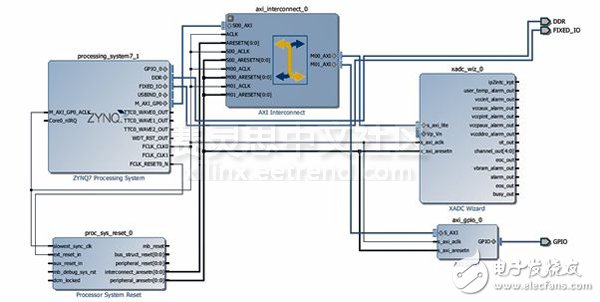
Core 1的应用程序代码可能要更加复杂一些,因为我们要在Zynq SoC的PL(可编程逻辑)部分调用GPIO模块,用于驱动控制MicroZed I/O扩展板上的LED灯。同赛灵思其他的接口一样,standalone OS使用一句 #include "xgpio.h"代码就提供了gpio接口的驱动信息,这个文件与我们之前驱动PS部分的MIO/EMIO GPIO接口所使用的xgpio_ps.h文件有一些小的不同,在这个例程中我想为大家展示如何在Zynq SoC的PL部分使用GPIO接口。
为了确保我们能够看出LED灯的亮灭状态的切换,我们将使用Core 1私有的定时器,这与我们之前使用Core 0定时器是一样的。
在 Core 1的程序开始执行它的主程序之前,我们需要禁止片上存储(OCM)的缓存功能,初始化GPIO接口,初始化私有的定时器,和配置中断控制器,这样私有的定时器中断才能够被用来控制LED灯亮灭状态的切换。我们将使用Zynq SoC应用程序和禁止缓存的异常机制完成这些功能。
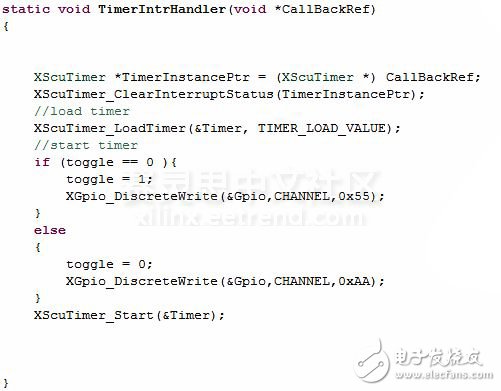
现在我们可以开始编写相当简单的中断服务程序,当私有的定时器计时结束然后重新计时时,这些中断服务程序就能够控制LED灯的亮灭。这个处理过程会一直进行,我选择使用十六进制的AA和55交替转变赋值给LED灯,控制LED灯的亮灭状态。这个选择将会是所有的LED灯"流动起来",与所有LED灯的全亮或者全灭状态是有一些区别的。
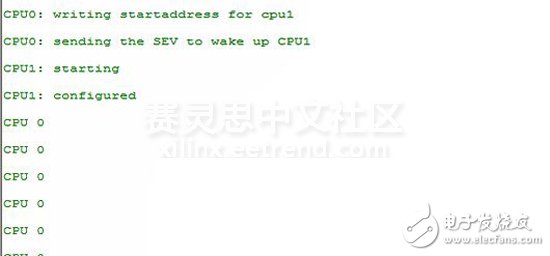
下图是程序执行的结果,通过Core 0输出到终端对话框窗口:
- Xilinx多协议机器视觉摄像机参考设计(12-01)
- 人工智能实现的流派 FPGA vs. ASIC看好谁?(08-27)
- 采用Xilinx Zynq SoC实现眼动追踪技术 让眼睛也可以控制计算机(06-28)
- EyeTech视线跟踪技术如何成为主流?(06-28)
- 基于赛灵思FPGA的端到端广播平台解决方案的实现(10-27)
- 玩转赛灵思Zedboard开发板(3):基于Zynq PL的流水灯(11-05)