基于ARM和FPGA的多路电机控制方案
时间:09-27
来源:
点击:
真结果如图7所示,访问一个存储器地址就对应着一组脉冲个数和分频值的输出。
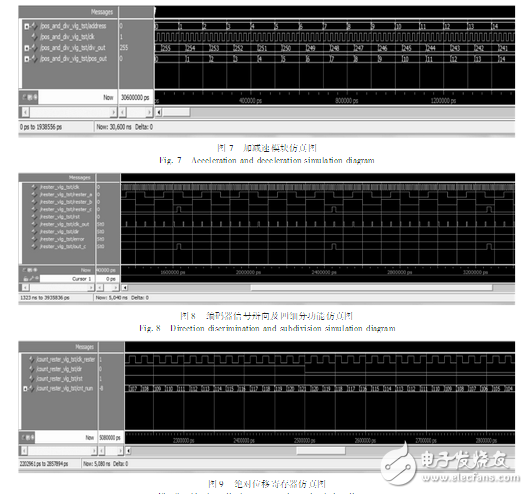
2)编码器反馈辨向及四细分
编码器反馈信号由A、B、Z三相信号组成。A、B两相信号相位相差90度,一个周期内A、B相信号会出现4种不同的组合状态,根据这一特征可以对编码器信号进行辩相和四细分处理。Z相信号为编码器零位信号,当编码器旋转一圈,Z相就会有信号输出。
在QuartusⅡ编译环境下成功编译之后,调用Modulesim仿真软件,编写仿真程序,使之产生全局时钟、复位信号、相位差为90度的A、B相信号和Z相信号。如图8所示,给出了该多轴控制器中所采用的编码器信号辩相及四细分的功能仿真图。
3)绝对位移记录
多轴专用控制器可以将电机运行的绝对位移实时地上传给上位机,这一功能的实现就有赖于fpga中的绝对位移记录部分的逻辑功能。在fpga内部设置一个绝对位移寄存器,用来对编码器反馈信号(辨向四细分之后)进行计数运算。当编码器信号的一个脉冲到来时,根据辩向后的方向信号做不同的运算处理。方向为正则绝对位移寄存器的值就进行加1运算,否则进行减1运算,从而达到对绝对位移进行记录的目的。并且arm可以随时读取该绝对位移寄存器的值,然后将其值上传给上位机,从而完成实时上传电机运行位置信息的功能。编写仿真程序对绝对位移寄存器进行功能仿真,结果如图9所示。
4 结束语
该方案成功已应用于某6轴Stewart平台运动控制中,在实现了0.1μm的运动定位精度的同时,运动机构得到了很好的保护,多次实验及实际使用中,该专用控制器运行安全可靠。
- 用于白家电应用的无刷直流电机驱动及控制方案(09-12)
- 意法半导体:三相电机控制解决方案(02-25)
- 最新知名厂商电机控制解决方案集锦(07-15)
- 《马达与电机控制设计核心攻略》你值得拥有!(04-30)
- ADI基于ADSP-CM408的电机控制系统(02-23)
- 详解二次回路的基本控制原理(09-11)