三轴陀螺仪基本技术原理解析
在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic effect)。
陀螺仪的种类很多,按用途来分,它可以分为传感陀螺仪和指示陀螺仪。传感陀螺仪用于飞行体运动的自动控制系统中,作为水平、垂直、俯仰、航向和角速度传感器。指示陀螺仪主要用于飞行状态的指示,作为驾驶和领航仪表使用。
我们现在常接触的便是电子式的陀螺仪,有压电陀螺仪,微机械陀螺仪,光纤陀螺仪,激光陀螺仪等,并且还可以和加速度计,磁阻芯片,GPS,做成惯性导航控制系统。
MEMS陀螺仪基本技术原理
要想将陀螺仪技术应用于手机、MID、手柄、鼠标、数码相机这样的小型设备中,将传统陀螺仪小型化是必然,为此,MEMS陀螺仪正全面走进数码设备、游戏设备。MEMS是什么呢?MEMS(Micro Electro Mechanical systems,微电子机械系统)是建立在微米/纳米技术基础上的前沿技术,其是一种可对微米/纳米材料进行设计、加工、制造、测量和控制的技术。它可将机械构件、光学系统、驱动部件、电控系统集成为一整体单元的微型系统。
MEMS产品已被广泛地应用于。。.数码相机(防抖防震器件,使用MEMS陀螺仪产品即便在持续震动的环境中,也能准确地进行归零的动作)、笔记本电脑或MID、手机(如加速度计)、MP3/MP4、游戏机等消费电子产品中。陀螺仪利用这种技术,可在硅片上形成微米尺度的精密谐振结构,用来感应角速度的大小和方向。
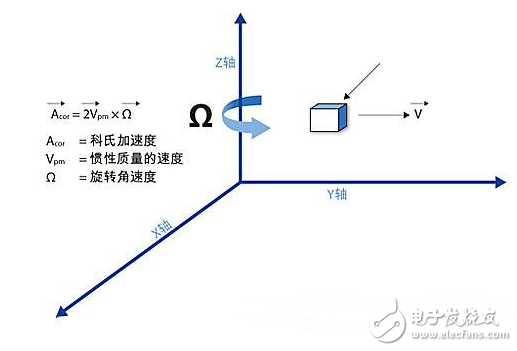
与传统的利用角动量守恒原理的陀螺仪相比,MEMS陀螺仪使用了不同的工作原理。传统的陀螺仪是一个不停转动的物体,其转轴的指向不随承载它的支架旋转而变化。要把这样一个不停转动的没有支撑的能旋转的物体用微机械技术在硅片衬底上加工出来,显然难上加难。为此,MEMS陀螺仪在基于传统陀螺仪特性的基础上利用科里奥利力来实现了设备的小型化。什么是科里奥利力呢?科里奥利力(Coriolis force)也就时常说的哥里奥利力、科氏力,它是对旋转体系中进行直线运动的质点由于惯性相对于旋转体系产生的直线运动的偏移的一种描述,其来自于物体运动所具有的惯性,由于地球自转运动而作用于地球上运动质点的偏向力就是这样的代表,地转偏向力有助于解释一些地理现象,如河道的一边往往比另一边冲刷得更厉害。
MEMS陀螺仪是科里奥利力的最常见应用,MEMS陀螺仪利用科里奥利力(旋转物体在径向运动时所受到的切向力),旋转中的陀螺仪可对各种形式的直线运动产生反映,通过记录陀螺仪部件受到的科里奥利力可以进行运动的测量与控制。为了产生这种力,MEMS陀螺仪通常安装有两个方向的可移动电容板,"径向的电容板加震荡电压迫使物体作径向运动,横向的电容板测量由于横向科里奥利运动带来的电容变化。"这样,MEMS陀螺仪内的"陀螺物体"在驱动下就会不停地来回做径向运动或震荡,从而模拟出科里奥利力不停地在横向来回变化的运动,并可在横向作与驱动力差90°的微小震荡。这种科里奥利力好比角速度,所以由电容的变化便可以计算出MEMS陀螺仪的角速度。
三轴角速度与旋转速率成正比
以意法半导体的MEMS陀螺仪为例,其核心元件是一个微加工机械单元,在设计上按照一个音叉机制运转(音叉机制的工作原理是通过安装在音叉基座上的一对压电晶体使音叉在一定共振频率下振动,当音叉开关的音叉与被测介质相接触时,音叉的频率和振幅将改变,音叉开关的这些变化由智能电路来进行检测,处理并将之转换为一个开关信号)。电机驱动部分通过静电驱动方法,使机械元件前后振荡,产生谐振,利用科里奥利力把角速率转换成一个特定感应结构的位移,两个正在运动的质点向相反方向做连续运动。只要从外部施加一个角速率,就会出现一个力,力的方向垂直于质点的运动方向。产生的力使感应质点发生位移,位移大小与所施加的加速度速率大小成正比,位于旁边的传感器就能感应出在定子和转子之间引起的电容变化,从而实现操控功能。并且,由于在控制电路内部嵌入了先进的电源关断功能,可以在不需要传感器功能的时候关闭整个传感器,或让其进入深度睡眠模式,便可大幅降低陀螺仪的总功耗。从而像手机等便携式设备就会由此获得更长的续航时间。
MEMS陀螺仪技术发展方向
在苹果公司的iPhone和任天堂公司的Wi i游戏机的推动下,"运动传感"概念深入人心,具备微型化智能化特征的MEMS陀螺仪正成为用户关注的焦点,正成为消费类电子设备运动传感的关键器件。著名市
- 详解三轴陀螺仪的技术原理(09-26)
- 微电子机械系统加速传感器瞄准医疗领域的应用(04-02)
- 可穿戴传感器的类型及其重要性(02-10)
- VR利器惯性动作捕捉系统原理及优缺点解析(04-06)
- 无人机的飞行感知技术解析(02-03)
- 基于MPU-3000?系列运动处理组件的三轴陀螺(11-23)