基于MEMS六轴传感器的可穿戴运动监测系统设计
TI 公司的CC2541。MPU6050 和BMP180 通过I2C 总线和CC2541相连,将采集到的数据传输给蓝牙芯片。蓝牙芯片再通过板子上的巴伦滤波器和陶瓷天线将收集到的数据传输出去。详细系统原理图2。将俩部分电路集成在同一个电路板在上,制作出一套开穿戴开发平台,如图3。通过这套自行研发的开发平台,可以做大量轨迹实验,为下一步的轨迹模拟提供了实验环境保证。
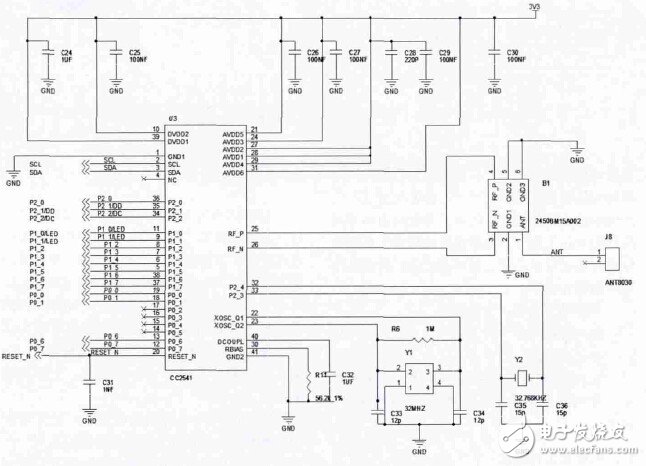
图2(a):系统电路原理图CC2541 部分
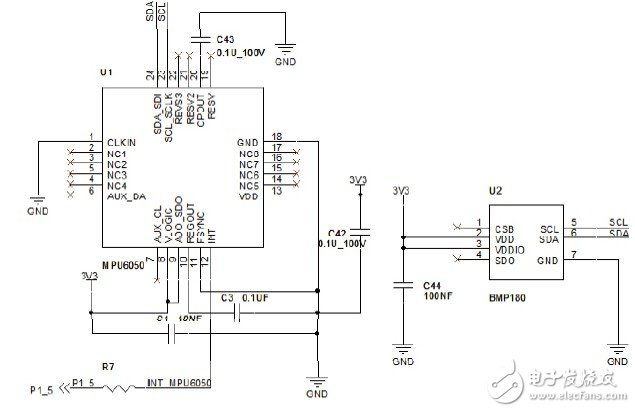
图2(b):系统电路原理图传感器部分
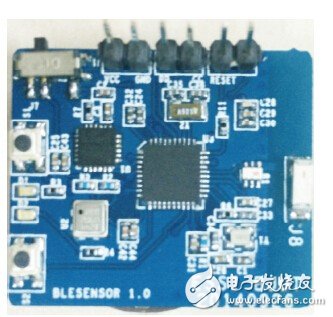
图3:可穿戴开发设备
3 运动轨迹仿真系统设计
基于已有的可穿戴开发平台,本仿真系统通过对运动轨迹产生的加速度信号进行数据采集。对采集到的信号进行预处理之后完成对加速度积分以及后期的误差补偿,最后实现对运动轨迹的1:1 的仿真。
仿真系统主要分为三个主要部分:六轴传感器、蓝牙和上位机处理。六轴传感器主要包括三轴加速度传感器和三轴陀螺仪,分别对运动过程中产生的加速度信号和角速度信号进行采集;蓝牙主要负责接收六轴传感器采集到的数据,并将数据通过蓝牙信号输出给上位计算机;上位机处理主要实现数据处理的功能。
仿真系统总体结构图如图4 所示。
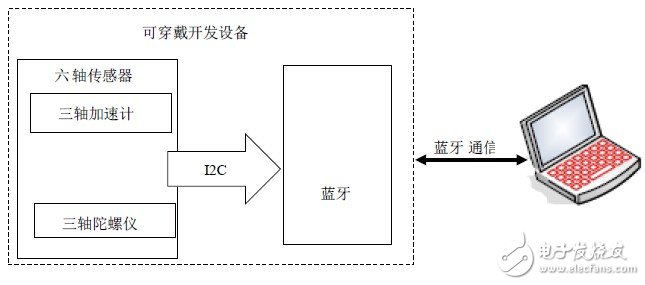
图4:仿真系统结构图
4 运动轨迹仿真实验测试结果
通过蓝牙芯片,限定六轴传感器的采集速率为每秒20 组数据,一组六个值包括三个加速度值和三个角速度值,每个值包括16 个字节。将采集到的原始数据直接通过蓝牙传输发送到计算机中进行处理,然后通过MATLAB对数据进行数据处理和轨迹仿真。如图5,确定坐标系。
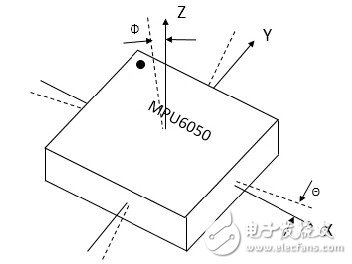
图5:传感器的坐标系示意图
4.1 静止状态
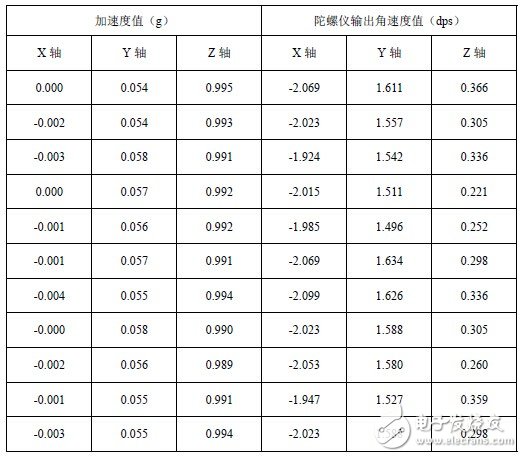
在完全静止状态下,将可穿戴开发平台放置水平桌面,Z 轴方向垂直于水平桌面,与重力方向重合。理论上讲,加速度值在X 轴和Y 轴输出为0,Z 轴输出为1g;陀螺仪的输出应该全部为0。但是由于随机噪声的存在,输出值应该有一定的偏差。测量30s 得到的600组数据。选择其中的10 组如下表。示意图如表1。
表1
4.2 匀速状态
选取XYZ 三个轴中的X 轴,沿X 轴做匀速直线运动,采集传感器得到的数据。将可穿戴开发平台沿X 轴方向匀速移动19s,共采集到380 组数据,选其中10 组数据如表2。
表2

5 结论
本可穿戴开发平台设计是基于MEMS 六轴传感器MPU6050 的基本原理,并且结合了蓝牙的传输技术,可以方便、快速的将运动采集到的数据快速的传输到PC 上。采集到的数据主要应用于后期可穿戴计算的研究。
- MEMS六轴传感器的可穿戴设备电路设计—电路精选(37)(02-05)
- 微电子机械系统加速传感器瞄准医疗领域的应用(04-02)
- 可穿戴传感器的类型及其重要性(02-10)
- VR利器惯性动作捕捉系统原理及优缺点解析(04-06)
- 无人机的飞行感知技术解析(02-03)
- 基于MPU-3000?系列运动处理组件的三轴陀螺(11-23)