基于DSP的三相8极无刷直流电机控制设计
适应PID控制算法实现转速的调节,算法可以对控制参数进行自适应调整,从而提高系统的抗干扰性和对环境的自适应性。算法表达式如下:

式中,ηI、ηP、ηD分别为积分、比例、微分的学习速率;wi(k)为加权系数;K为比例系数,K》0;e(k)为速度偏差;De(k)为速度偏差的变化量。
算法的实现过程为:电机运行时,通过DSP的通用定时器可以获取相邻两次霍尔信号变化的时间间隔,从而计算出电机的实时转速。与给定速度比较,可以得到转速的偏差error。与上次得到的偏差error_1相减,可得偏差的变化量d_error。根据算法表达式,可以得到程序的流程图,如图4所示。
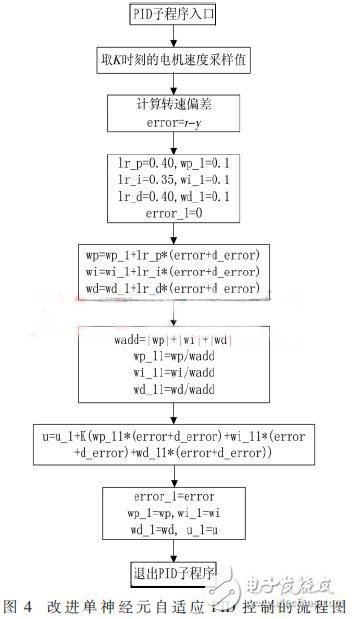
图中,r为给定转速,y为电机反馈的实际转速,error和error_1为转速偏差,d_error为偏差的变化量,lr_p、lr_i、lr_d分别为比例、积分、微分的学习速率,wp、wi、wd、wp_1、wi_1、wd_1、wp_11、wi_11、wd_11、wadd为加权系数,K为比例系数,u和u_1为系统的输出。
4 实验结果与分析
4.1 PWM控制信号的测试
为了降低功率管MOSFET的功率损耗,采用上桥臂工作于PWM状态进行调压的控制方法,下桥臂工作于常通状态。如图5、图6分别为A相上桥臂和下桥臂的MOSFET工作波形。


4.2 转速信号检测
转速调节程序中首先采用传统PID控制算法,设置电机的运行时间为5 s,给定转速为2 500 r/min。电机开始运行,期间每隔50 ms计算一次转速,并保存在数组中,5 s后电机停止运行。转速调节程序采用改进单神经元自适应PID控制算法,重复上述实验,分别得到如图7、图8所示的速度响应曲线。
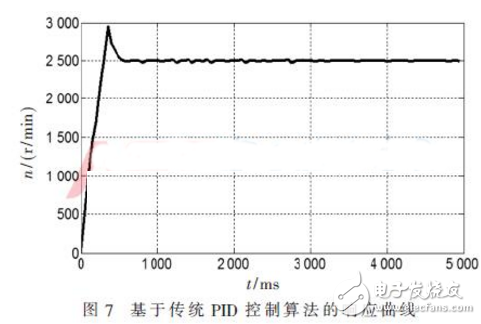
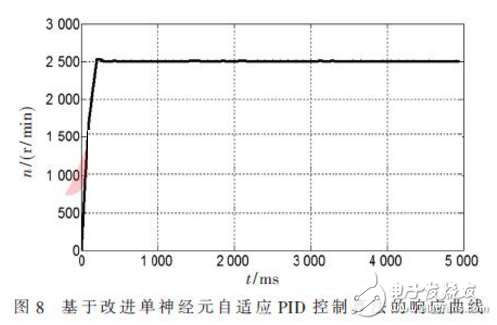
通过对比上面速度响应曲线,可以得出:在给定转速(2 500 r/min)下,采用传统PID控制算法,系统自空载启动到达稳态所需时间为0.6 s,且超调量较大,约为20%;采用改进单神经元自适应PID控制算法,系统自空载启动后在较短时间内(约0.2 s)进入稳定状态,超调量很小,仅为1%左右,此外,速度曲线的波动很小。
5 结论
本文以三相8极无刷直流电机为控制对象,设计了无刷直流电机控制系统,对主要硬件电路和软件程序做了详细设计,并给出了相应的电路原理图和程序流程图,其中转速调节算法采用改进单神经元自适应PID控制算法。实验表明,所设计的无刷直流电机控制系统是可行的,转速调节采用改进单神经元自适应PID控制算法,可以使无刷直流电机的响应时间更短,超调量和波动更小,达到了预期目的。
作者:岳学磊,白 鹏,杨瑞坤,华伟民
参考文献
[1] 马文斌,杨延竹,洪运。步进电机控制系统的设计及应用[J]。电子技术应用,2015,41(11):11-13.
[2] 徐龙威,杨帆,徐令令,等.基于TMS320F28335无刷直流电机控制系统设计[J].电子测量技术,2013,36(9):79-83.
[3] 夏长亮,刘丹,王迎发,等.基于模糊规则的无刷直流电机免疫PID控制[J].电工技术学报,2007,22(9):68-73.
[4] 代睿,曹龙汉,何俊强,等.基于微粒群算法的无刷直流电机单神经元自适应控制[J].电工技术学报,2011,26(4):57-63.
[5] 夏长亮,郭培健,史婷娜,等.基于模糊遗传算法的无刷直流电机自适应控制[J].中国电机工程学报,2005,25(11):129-133.
[6] 胡云宝,王加祥,曹闹昌.基于RBF神经网络无刷直流电机调速系统[J].微电机,2013,46(1):63-66.
2016年电子技术应用第4期
- 德州仪器(TI)3D机器视觉参考设计(11-30)
- 无人机高清影像实时压缩处理传输平台解决方案(03-22)
- 基于TMS320LF2407A的机器人运动控制系统软件设计(08-18)
- 基于EDMA的TMS320C6713片外Flash自举引导(02-12)
- TI C2000(TM)加速实时控制应用(08-03)
- 用于海洋搜救的多DSP图像处理识别系统(04-25)