详细解读:MSP430G2553单片机串口通信
接收缓存可以复位接收时产生的各种错误标志、RXWAKE位和URXIFGx位。如果传输7位数据,接收缓存内容右对齐,最高位为0。当收接和控制条件为真时,接收缓存装入当前接收到的字符。
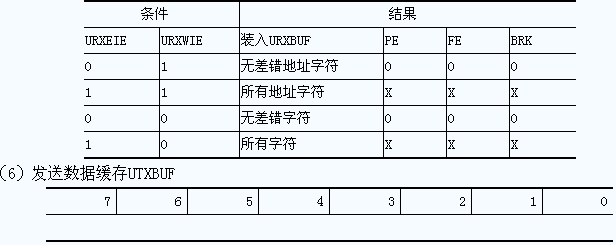
发送缓存含有当前要由发送器发送的数据。UTXIFG 标志表示UTXBUF已准备好接收下一个要发送的字符。将数据写入UTXBUF初始化发送功能。如果发送移位寄存器为空或即将为空,数据的发送立即开始。只有当UTXBUF为空时,数据才能写入缓存,否则可能发送不可预料的字符。
例子:
#include"msp430G2553.h"
#include "in430.h"
void UartPutchar(unsigned char c);
unsigned char UartGetchar();
unsigned char temp=0;
unsigned char number[2]={0};
void main( void )
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
BCSCTL1 = CALBC1_1MHZ; // Set DCO
DCOCTL = CALDCO_1MHZ;
P1DIR|=BIT6;
P1OUT&=~BIT6;
P1SEL = BIT1 + BIT2; // P1.1为 RXD, P1.2为TXD
P1SEL2 = BIT1 + BIT2; // P1.1为 RXD, P1.2为TXD
UCA0CTL1 |= UCSSEL_2; // 选择时钟BRCLK
UCA0BR0 = 106; // 1MHz 9600
UCA0BR1 = 0; // 1MHz 9600
UCA0MCTL = UCBRS2 + UCBRS0; // 波特率=BRCLK/(UBR+(M7+.。.0)/8)
UCA0CTL1 &= ~UCSWRST;
// 初始化顺序:SWRST=1设置串口,然后设置SWRST=0,最后设置相应中断
IE2 |= UCA0RXIE; // 使能接收中断
while(1)
{
//UartPutchar(9);
// display_int(temp,0);
__delay_cycles(10000);
}
}
/**********************************UART接收中断*************************/
#pragma vector=USCIAB0RX_VECTOR
__interrupt void USCI0RX_ISR(void)
{
//while (!(IFG2&UCA0TXIFG)); // 等待发送完成
//UCA0TXBUF = UCA0RXBUF; // TX -》 RXed character
temp=UCA0RXBUF;
}
/******************************UART发送字节函数*************************/
void UartPutchar(unsigned char c)
{
while(!(IFG2 & UCA0TXIFG)); //待发送为空
UCA0TXBUF=c;
IFG2 &=~UCA0RXIFG;
}
/*********************************UART接收字节数据******************/
unsigned char UartGetchar()
{
unsigned char c;
while(!(IFG2 & UCA0RXIFG)); //等待接收完成
c=UCA0RXBUF;
IFG2 &=~UCA0TXIFG;
return c;
}
/******智能控制工作室*******/
MSP430G2553串口通信 MSP430G2553 相关文章:
- 基于MSP430的控制电机并测速度系统设计与调试(08-05)
- MSP430G2553的引脚功能详细图解(07-04)
- MSP430G2553的原理图(07-04)
- 分解MSP430G2553的时钟系统(07-04)
- 20引脚的MSP430G2553引脚功能表(07-04)
- MSP430G2553捕获程序案例与经验分享(07-04)