测试运算放大器需要稳定的测试环路
本文我们将介绍使用推荐测试电路时所涉及的补偿问题。如果测试电路中的环路不稳定,那它就没有用。在测试过程中要一直监控被测试器件测试环路的输出。如果环路发生振荡,而您不知道,您可能会报告不好的结果。更糟糕的是,您可能很晚才发现,而此时纠正该问题已经更难了。
自测试补偿
使用大型电阻器测试 ![]() 时,需要为每个 Ib 电阻器布置一个小电容器,以保持环路稳定(请参考之前的文章)。添加该电容器可降低电阻器噪声,但要注意在测量之前要完全充电电容器。
时,需要为每个 Ib 电阻器布置一个小电容器,以保持环路稳定(请参考之前的文章)。添加该电容器可降低电阻器噪声,但要注意在测量之前要完全充电电容器。
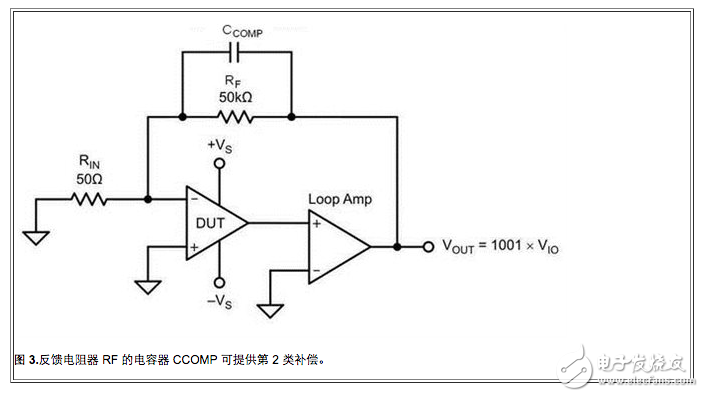
双放大器环路补偿
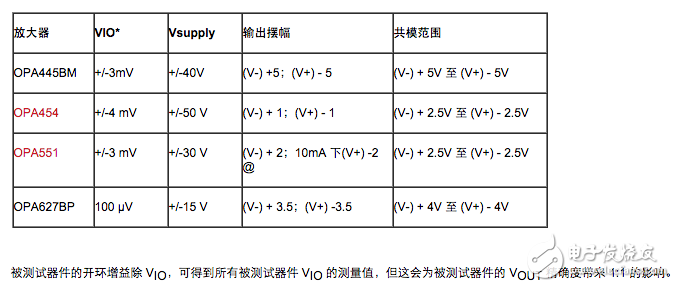
有几款运算放大器适合环路放大器,它们包括 OPA445($5.3438)、OPA454($3.0938)、OPA551($2.1375) 和 OPA627BP($22.3425),但其它类似器件也没问题。表 1 针对该目的使用的任何放大器列出了重要的特性参数:
表1.第 1 类及第 2 类补偿所需的放大器特性。
如果失调电压时间增益会导致环路放大器输出进入电轨,您可能需要一款电源大于被测试器件电源的环路放大器。这种情况下可能需要对被测试器件的最终性能进行微调。例如,如果最初未微调的失调电压是 20mV,那么环路放大器就需要能够支持 20V 摆动。这种问题在测量 ![]() 时也会出现。
时也会出现。
指零放大器的输入共模范围是重要的考虑因素。将环路放大器的电源与共模范围进行部分结合,必须有助于实现被测试器件的轨至轨输出。您可以通过偏移被测试器件的电源来实现这一点。在环路放大器中获得额外的共模范围非常便捷。
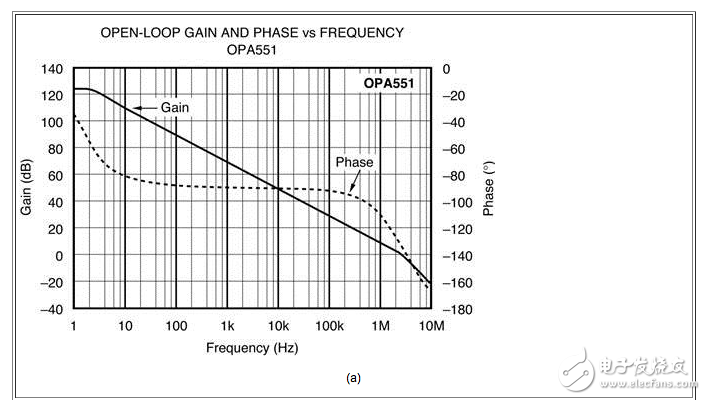
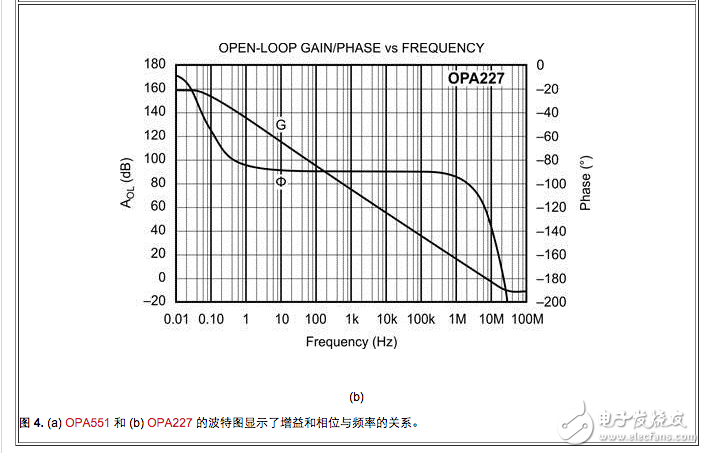
一旦选择环路放大器,您就需要获取环路放大器和被测试器件的波特图。图 4 是 OPA551 和 OPA227($1.5200) 的波特图。这些波特图都是来自产品说明书的典型曲线。我们将 OPA551 作为环路放大器,将 OPA227 作为被测试器件,如图 4 中的实例所示。
从图 4 中的波特图可以看到,OPA551 的增益带宽 (GBW) 是 3MHz,OPA227 的增益带宽是 8MHz。OPA551 的 DC 增益大约为 125dB,OPA227 的 DC 增益大约是 160dB。
第 1 类补偿法
有了环路放大器和被测试放大器的波特图,您可以绘制出代表测试环路的波特图。可使用对数标尺方格纸手工绘制波特图来确定补偿电容器值,这种方法固然可靠,不过使用电子数据表会使该任务得到大幅简化。一旦设定好了电子数据表,再为任何新部件确定补偿值都会很轻松。
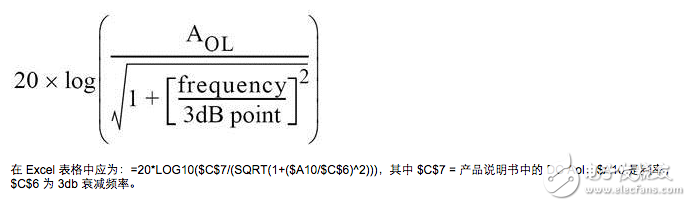
第 1 类补偿需要用到几个公式。被测试器件使用公式 1:
公式 1 应该创建一个与被测试器件产品说明书中开环增益曲线匹配的曲线。您可通过调整 3dB 点来确定曲线,获得正确的带宽。
在双放大器环路中,被测试器件的输出可作为输入连接至环路放大器。因此,这些运算放大器可进行级联。增益是两个放大器增益的乘积。以分贝为单位时,增益乘积就是求和。由于我们以分贝为单位,因此应将公式 1 和公式 3 相加得到两个放大器的总和。
在Excel表格中应为:=B10+C10
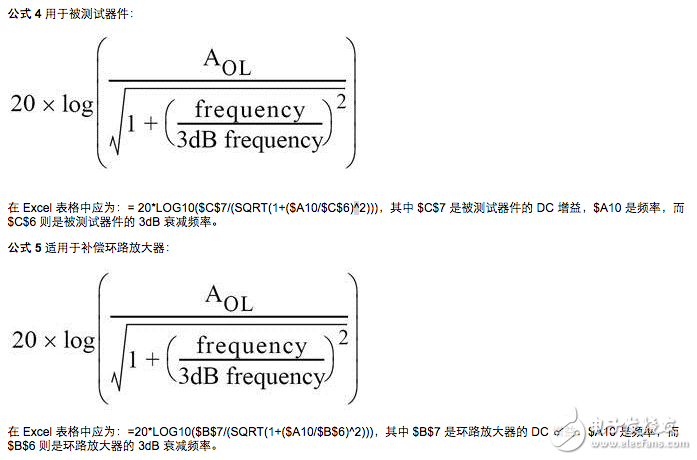
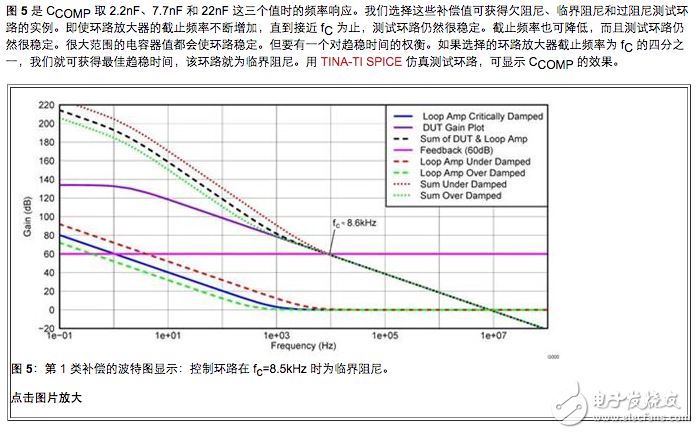
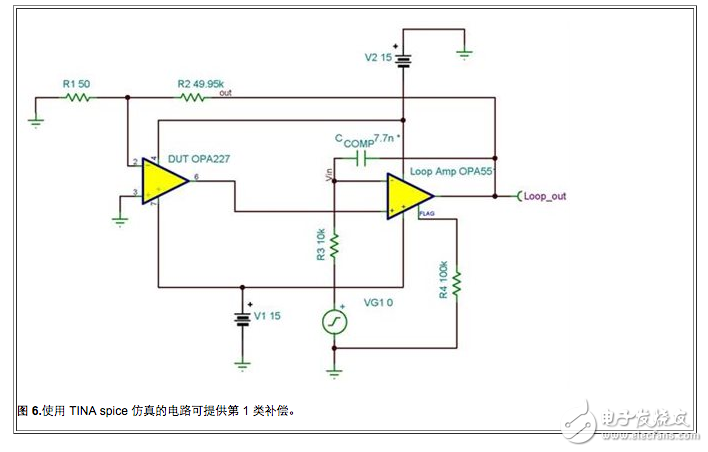
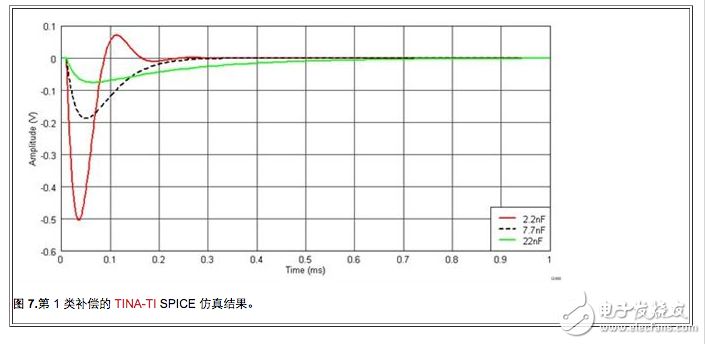
图 6 中的电路可仿真第 1 类环路响应。
我们分别针对 C1=2.2nF、7.7nF 和 22nF 运行了瞬态仿真。环路控制输入从 0V 变成了 10V,就像测量运算放大器 Aol 时的情况一样。图 7 是所得的输出波形。三种情况环路都很稳定,但小于 7.7nF 时有明显的振铃。因此,环路为欠阻尼。电容器值高于 7.7nF 时,环路为过阻尼状态。电容器为 22nF 时,环路在 1.0ms 内还未趋稳。它最终还是会趋稳,但会消耗更多的测试时间。
第 2 类补偿法
对于第 2 类补偿,我们需要绘制出被测试器件和环路放大器的波特图。公式 4 至 5 相同,但一个代表被测试器件,另一个代表环路放大器。
接下来绘制这两条增益曲线的总和图。
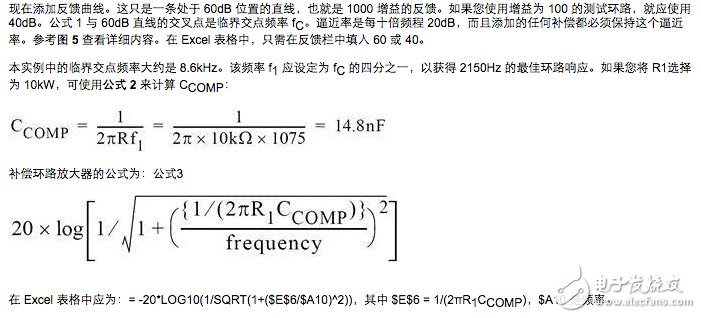
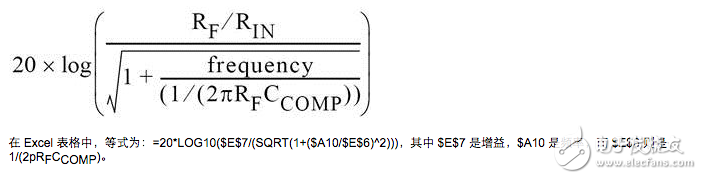
最后,使用公式 6 绘制反馈网络的曲线
在 Excel 表格中应为:=20*LOG10($7.8187)($B$7/(SQRT(1+($A10/$B$6)^2))),其中 $B$7 是环路放大器的 DC 增益,$A10 是频率,而 $B$6 则是环路放大器的 3dB 衰减频率。
接下来绘制这两条增益曲线的总和图。
最后,使用公式 6 绘制反馈网络的曲线:
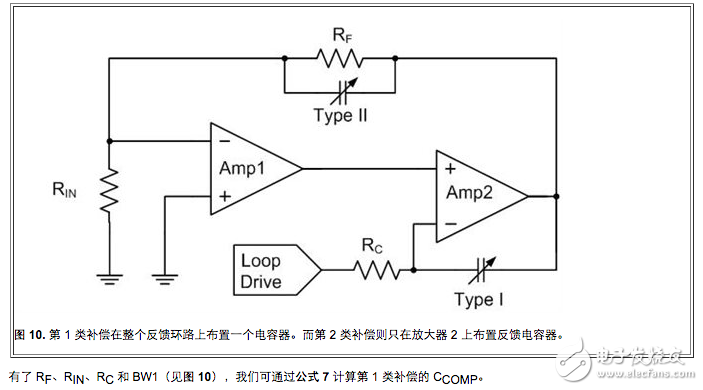
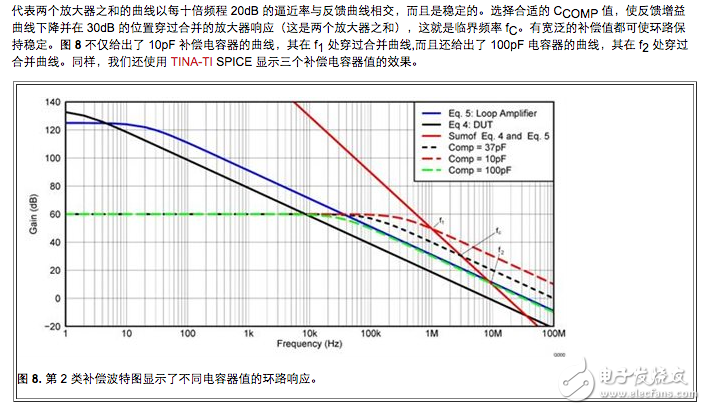
图 8 是所得到的曲线。
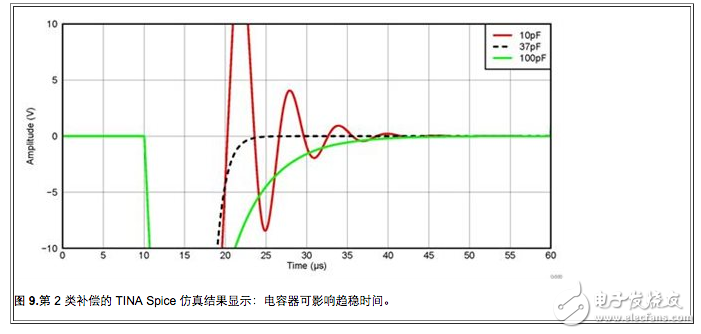
图 9 是不同补偿电容器对环路趋稳时间的影响。选择用于提供 30dB 交点频率的电容器,可获得临界阻尼响应。
现在我们可以比较两类补偿的环路响应。当是临界阻尼时,第 2 类补偿可使电路在大约 27µs 内趋稳。这就意味着它的趋稳时间是 17µs,因为图 9 中环路控制在 10µs 时被改变。第 1 类补偿直到大约 450µs 时才稳定。第 2 类补偿趋稳时间要快 26 倍。即使第 2 类补偿是欠阻尼和过阻尼状态,趋稳速度也
运算放大器 相关文章:
- 运算放大器选择指南 助您获得上佳的噪声性能(09-10)
- 运算放大器组成阶梯波发生器电路图(10-11)
- 运算放大器的噪声(04-07)
- 匹配的电阻器最大限度地提高放大器的性能(04-10)
- 放大器漏电流分析(02-07)
- LTC6268-10 示波器差分探头(12-02)