基于ARM处理器的吸尘机器人硬件设计
和碰撞传感器模块
本吸尘机器人在工作时对于远距离障碍物主要利用超声波测距,但是超声波对近距离障碍物不敏感,所以增设红外模块进行近距离检测,根据能量反射法设计红外测量模块。机器人前后安装两组红外传感器,每组由多达14组红外发射接收管组成,在机器人的上面和底盘各安装14个,每上位和下位的2个红外发射和接收管并联并且指向同一个方向构成一组,每一组电路可分为高频脉冲信号产生、红外发射调节与控制、红外发射驱动、红外接收等几个部分。通过38 kHz晶振和非门电路得到一个38 kHz的调制脉冲信号;利用三极管驱动红外发射管(TSAL6200)的发射。发射管发出的红外光经物体反射后被红外接收模块接收,通过接收头 (HS0038B)内部自带的集成电路处理后返回一个数字信号,输入到微控制器的I/O口,如图5所示。
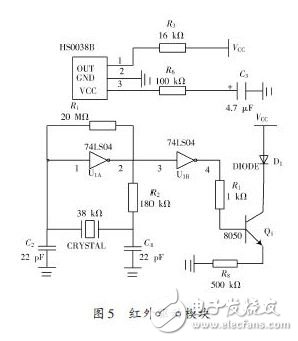
接收头如果接收到38 kHz的红外脉冲就会返回输出低电平,否则就会输出高电平。通过对I/O口的检测,便可以判断物体的有无。这样一共可以检测14个方向,覆盖360°范围。机器人对前后的近距离障碍物都能检测,前进后退都能工作,这种由2个红外接收管组成测障传感器有效距离接近2 m,并且还能够在球非常近的范围内(10 cm内)读取障碍物距离结果(没有溢出)。
在机器人的左前、左后、右前、右后4个方位安装四个碰撞开关(常开),通过采集模拟口上电压值的变化,判断出其中的一个或几个碰撞开关闭合,从而检测出哪个方向有碰撞发生。
2.4 人机交互模块
(1)液晶显示和键盘输入:两者配合使用可以设置机器人各种参数,如自主启动、设置工作时间等。
(2)无线遥控模块:红外遥控使机器人的使用更加方便简单,发射距离超过10m,能满足需要。
3 结语
通过这样的硬件设计,清洁机器人控制系统,既能满足良好的实用性,还降低了成本,工作稳定可靠。机器人传感器模块能精确定位障碍物,通过软件策略能实现良好的避障。对将来家用服务机器人的研究与开发有着重要现实意义。
- 精华:基于ARM处理器的机器人硬件设计(04-18)
- 阿里巴巴将大量采用ARM处理器 Intel怎么办?(11-14)
- 给学习嵌入式开发者的十点建议(06-21)
- ARM处理器全解析:A8/A9/A15都是什么?(02-27)
- Arm Powered数码产品与你一路相随(08-14)
- 25款经典老芯片,认识5款以上的工程师证明你最牛!(08-27)