可视化远程遥控移动机械手设计与实现
时间:06-30
来源:互联网
点击:
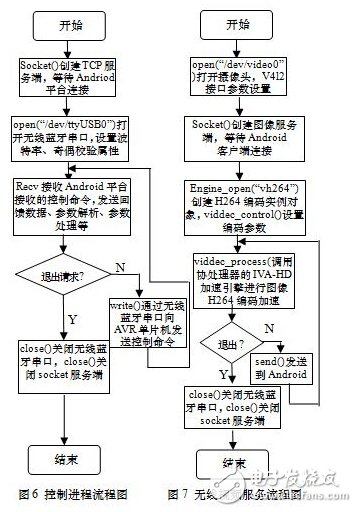
调用协处理核的IVA-HD的加速引擎来提高视频编码效率。为了减小网络带宽需求、提高无线传输效率,本次采用Baseline、 Level3.2编码级别。最后将H264编码缓存通过无线网卡Socket服务端发送到Android客户端进行解码显示。控制进程和无线视频传输进程的流程如图6、7所示:
3 测试

表2 无线视频传输实时性测试
由于借助异构多核处理器OMAP4430内部的协处理核Cortex-M3和IVA-HD多媒体硬件引擎来实现H264编码加速,因此本次720P无线视频传输实时性较高,达到了28帧每秒。
4 结语
针对移动机械手控制方式复杂,环境周围信息获取能力不足的缺点,采用Android手机为控制中心,摇杆手柄为输入设备实现了移动机械手的可视化实时操作。同时利用OMAP4430异构多核处理器内部协处理核Cortex-M3、IVA-HD 多媒体引擎加快720P H264视频编码效率,提高了无线视频服务的实时性。实践证明系统具有人机交互方式友好、控制简单、多核间负债平衡、无线视频服务实时性强等优点。
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 严酷的汽车环境要求高性能电源转换(08-17)
- 适用于工业能源采集的技术 (08-10)
- 单片式电池充电器简化太阳能供电设计(08-20)