基于AM402的电流量输出电容式角度传感器的研究
引言
传统的差动式电容角度传感器测量角度有限,动片与外界有直接的电气连接,其电极要分别从动片和静片引出。从动片引出电极通常采用轴承、卡子或者金属张丝的方法,在动片转动过程中,不但转轴之间存在摩擦,而且容易造成引出线与动片转轴之间接触不良,出现机械故障,引入干扰和误差,影响测量精度。所以,设计了新型的电容式角度传感器,对结构进行了改进,克服了传统差动式电容角度传感器结构设计上存在的缺陷。
1、结构设计
该传感器系统采用新的结构设计方式。其中动片由2片张角为90°的相对的扇形金属板组成,金属板中间部分相连;而静片由2块张角为90°、中间部分分开的扇形金属板构成,电极分别从两静片引出,作为传感器的信号输出端。本质上,这种新结构的电容式角度传感器相当于2个可变电容的串联,电容的串联值随动片金属极板与定片金属极板之间相对角度的变化而变化。从静片引出电极的设计方式引线方便,有利于动片相对于静片的角度变化,而且动片与外界无电气连接,避免了测量过程中由于转动引起的摩擦和机械故障,从而真正实现了无接触式测量,提高了测量精度。
2、基本原理
电容传感器的基本原理是基于物体之间的电容量与结构参数之间的关系。对于平板电容器,若平行板无限大,忽略其边缘效应,其电容量公式表示为:
由式(1)可知介电常数、极板相对面积或极板间距的变化都可反映为电容值的变化。故可以用此原理测量物体的位移,物质的状态参数等。
根据设计结构,设此电容式角度传感器静片的半径为R,转动片与静片之间的距离(即极板间距)为d,空气的介电常数为En,转动过程中,每个张角为90~的转动片与静片相对面积的变化量为△s.初始状态转动片与静片相对面积为零,则△S1=△S2=△s.因为:
总的电容变化量为:
设转动片从初始位置开始,相对于静片转过的角度为口,当
电容变化量是随角度变化周期性变化的,在0~3印。内的每个象限,电容的变化量与角度变化量0都成线性关系,变化量最大为:
3、电容信号测量及其转化电路
3.1电容一电压转犊电路CAV424
CAV424是一种多用途的处理各种电容式传感器信号转换的集成电路,能够将电容信号转换成电压信号。它同时具有信号采集(相对电容量的变化)、处理和差分电压输出的功能,能够测量出被测电容和参考电容的差值,即在相对于参考电容值(10PF~2nF)5%~100%的变化范围内的电容值,并将其转化成相应的差分电压输出,具有高检测灵敏度;同时它还集成了内置温度传感器,当需要数字化信号修正时可直接用来监测温度。利用CAV424作为电容传感器的调理电路,可克服寄生电容和环境变化的影响,提高了测量精度和抗干扰能力。同时传感器外接元件较少,处理电路比较简单,仪器体积小。
3.2电压一电流转换电路AM402
AM402是处理差分信号输入、电流输出接口的集成电路,可以将输入的微弱的传感器差动电压信号转换成符合工业标准的二线方式输出(4~20mA)或者三线方式输出(0/4~20mA)的电流信号。AM402由3个基本的单元组成:
(1)高精度的前置放大器。其具有较大的增益调节范围,适合于不同的信号输入范围,可用于各种不同变化范围的传感器信号处理。
(2)由电压控制的电流输出级。通过调整偏置电压可以使输出电流在较宽的范围内可调。
(3)可调的参考电压。可为传感器或者外部元件提供5V或10V的电压。
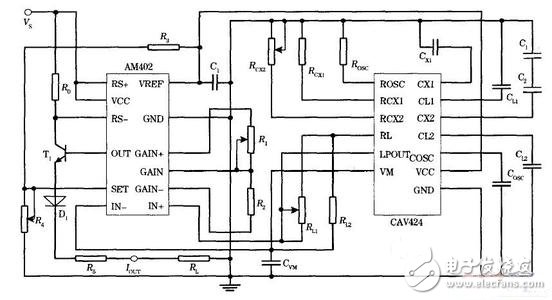
该电容式角度传感器的实际测量电路,其中可变电容C1和C2的串联部分为电容传感器等效电路部分。
4、实验与分析
实验设计中,根据AM402三线制输出电流的取值范围,调节电容传感器信号转换集成电路芯片CAV424的外接元件,使其输出的差分电压值为 0~200mV,即输入到电压一电流转换接口电路AM402的电压值为0~200mV,而AM402采用三线制输出方式,其输出电流范围为4~20mA.根据前述的理论推导可知,在实际应用中,角度传感器只适合取用0~2/π范围内电流输出随角度的增大而增大的线性变化区域,故在测量过程中,只测量0-2 /π内电流随角度变化的输出情况。通过负载的二电流输出随角度变化的测量结果。根据最-‘b~-乘法原理,对实验数据进行曲线拟合,得到一阶最佳线性拟合曲线。
结果表明实际测量值跟理论值基本吻合,与拟合曲线非常接近;在所测转角0~90~范围内,Iout呈线性输出。
5、讨论
由实验结果可以看出:拟合曲线与实际测量值相比,输出的初始电流值略小于4mA.这是因为实验过程中,要根据实际输出的电流值,对集成电路
- 传感器在人体倾角姿态仪和球底平衡台上的应用(08-19)
- 角度传感器工作原理及应用简介(11-06)
- LT3751如何使高压电容器充电变得简单(08-12)
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- 浪涌抑制器IC简化了危险环境中电子设备的本质安全势垒设计(08-19)
- 严酷的汽车环境要求高性能电源转换(08-17)