基于安芯一号的六轴姿态控制板设计
时间:02-17
来源:电子发烧友网
点击:
四、测试结果
项目达到的关键硬件指标
4.1系统实物图片
PCB正面图:

PCB反面图:
项目实物图:

4.2姿态融合效果分析
系统采用卡尔曼滤波函数进行加速度计与陀螺仪的姿态融合。图4.1所示为姿态融合前的系统水平时横滚角输出曲线图,即仅由加速度计ADXL345计算得到的角度。该组实验在动态条件下完成,即保持载体与水平面角度不变的前提下(在此测试横滚角,并取角度值为0°),人为给系统施加外力作用,使系统受到外部加速度干扰,同时记录数据绘制曲线。从图中可以看出,在系统受到外力作用下,数据精确度大大降低。图中最大误差达到50°。
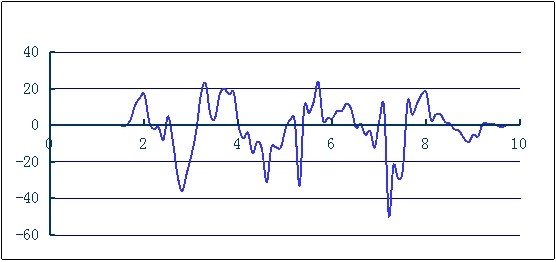
图4.1 姿态融合前横滚角输出曲线图
图4.2所示为姿态融合后的系统水平时横滚角输出曲线图。从图中可以看出,即使系统受到外部加速度的干扰,仍能保持横滚角在0°及0°附近很小的范围内波动。最大误差仅有1°。姿态融合算法有效减小了动态条件下的系统误差。
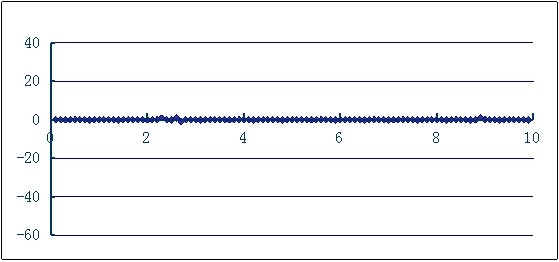
图4.2 姿态融合后横滚角输出曲线图
视频网址 http://pan.baidu.com/s/1dDoW0d7
- 基于安芯一号单片机的医用输液器智能控制系统(02-19)
- 基于安芯一号的智能保驾系统(02-19)
- 基于安芯一号的重力遥控小车(02-17)
- 微电子机械系统加速传感器瞄准医疗领域的应用(04-02)
- 可穿戴传感器的类型及其重要性(02-10)
- VR利器惯性动作捕捉系统原理及优缺点解析(04-06)