基于24V电源的双环电流型PWM控制器的设计方案
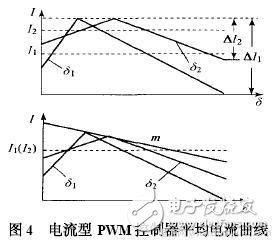
由于24V电源功率开关管的峰值电流由PWM 控制器保持恒定控制,也就是说,电感的峰值电流也保持恒定,但直流输出电压正比于输出电流平均值而不是峰值电流,当输入电压减小时,为了使电流恒定,占空比将调节为δ2,这时平均电流将上升为I2,输出电压也将上升。在电压型控制器中将不会出现这种问题,但在电压型控制器件下,仅有输出电压得到控制。因此,为了解决以上问题,在电流型控制器中需采用斜坡补偿加以解决。为了维持一个恒定的平均电流(输出电压),要求有一个与占空比无关的电流波形补偿斜坡,当( Ns/Np ) Rs ( m2/2) = m 成立时,输出电感平均电流与Ton无关,则保持了输出电压恒定。如图4 所示。
3.2斜坡补偿的实现
斜坡补偿可以用图5 所示电路来实现。一般R1的阻值预先设定,再计算R2 的阻值,很重要的一点是R2 的阻值应足够高,以避免使振荡器产生振荡频率漂移。
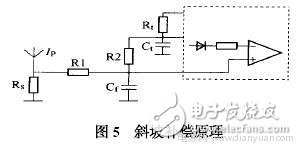
从斜坡端接电阻R2 至电流感应端,这时Rs 上的感应电压增加斜坡的斜率与平滑的误差电压进行比较,这在占空比达到50 %以上时非常有效。R2 阻值的一般计算步骤如下:
a ) 计算次级电感下斜坡: S1 = di/dt ( 单位为A/μs) ;
b) 计算初级电感下斜坡: S2 = S1 Ns/Np (单位为A/μs) ;
c) 计算检测电阻上的斜坡电压: V1 = S2 Rs (单位为V/μs) ;
d) 计算定时电容器CT 上的振荡器斜坡电压: S =dVosc/Ton (单位为V/μs) ;
e) 若令斜坡补偿量M = 0.75 ,R1 的阻值R1 设为1 kΩ ,则R2 = R1 ( Vs/VS2 ) M.
4 结束语
随着24V电源电流型PWM 控制器被越来越广泛地应用,正确掌握使用方法可以节约大量设计时间,并能取得较好的设计效果,因而是使用这一类控制器必须注意的问题。而本文针对电压型脉宽调制器(PWM)控制器只有电压控制环、电流变化滞后电压变化、系统响应速度慢、稳定性差等固有缺点,提出了一种基于24V电源的双环电流型PWM控制器的设计方案。该方案由于既对电压又对电流起控制作用,所以控制效果较好在实际中得到广泛应用。
- 大电流/高速LED驱动器彻底改变了PWM调光(08-19)
- 准固定频率滞环PWM电流模式控制方法的研究(12-07)
- 大电流/高速 LED 驱动器给 PWM 调光带来了突破性的改革(01-06)
- 取替RC采用硅振荡器定时更胜一筹(02-17)
- 解析PWM开关稳压电源尖峰干扰(07-19)
- 基于SPWM的交流稳压电源设计方案(09-15)