基于CAN总线的电梯主控系统软硬件设计
各路CAN模块电路基本一致,从微控制器中CAN控制器上引出输入/输出引脚RD/TD 到CAN 收发器TJA1050 相应的管脚上。为了减少终端反射对系统的影响,需要在每路CAN 总线的两最远端各加上120Ω的终端电阻。从通信角度看,电梯控制系统的设计是以主控系统为中心的CAN 通信系统的设计,因而在主控系统在设计的时,给每条CAN 总线的CANH 和CANL 之间添加上了120Ω的终端电阻是必要的。另外由于系统中的供电采用的是24V 的标准工业用电,而这非电子元器件的承受电压范围,因而避免在工程施工中接线错误对系统致命破坏,设计的时候在CANH 和CANL 口线上添加了TVS 管。如图3 所示。
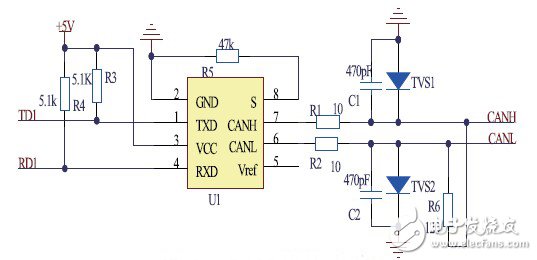
图3 CAN 模块电路。
CANH 和CANL 输出到GND 的匹配电容C1 和C2 经常被用于提高抗电磁干扰的性能。相应噪声源的阻抗和CANH 和CANL 对地的电容组成了一个RC低通滤波器,在抗干扰的性能的问题上电容的值应该尽可能大,才能获得低的角频率。另一方面输出级的整个电容负载和阻抗为数据信号建立了一个低通滤波器。因此相关的角频率要比数据传输频率高。这使电容值必须由节点的数量和数据传输频率决定。当TJA1050 的输出级阻抗大约是20Ω,总线系统有10个节点,速度是500kbit/s 则电容的值不应该超过470pF.
2.3 光耦输入电路
在电梯电气控制系统中主控系统为了电梯不发生安全事故,安全稳定地运行,因此要实时地从电梯安全保护系统中采集电梯井道信号。对于实时性要求非常高的输入开关量直接通过光耦输入到主控系统,如开/关门限位、上/下强减、上/下限位、光幕、门锁、抱闸反馈等开关量信号。另外为了减小输入信号对微控制器的影响,在微控制器端对这些开关量信号,采用了光耦隔离其电路原理图如图4 所示。
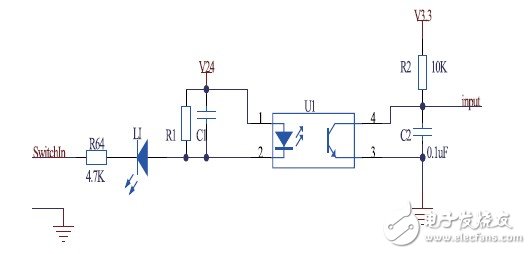
图4 光耦输入电路。
当然部分的对实时信号要求不是特别高的输入信号如消防、锁梯、直驶、满载、超载等,可以通过轿厢板或者外召板以同样的方式采集,然后通过CAN 总线传递给主控制系统。
2.4 继电器输出电路
在电梯的输出模块中,为了减小外部电路对微控制器系统的影响,采用了以2803 驱动继电器的开关量输出形式。如主输出、开/关门输出、抱闸输出、蜂鸣器、到站钟、电源管理、锁梯辅助、消防基站、超载指示、上行/下行指示。对于电梯中输出信号,与输入信号类似可以通过CAN 总线把信号传递给轿厢板或者外召板,然后采用以相同继电器输出形式输出。
2.5 其他模块
电源模块:采用24V 供电, 经LM2576 和AS1117-3.3 产生 5V 与3.3V 电压,用于系统的不同模块。复位模块:为使系统能够稳定可靠工作,复位电路是必不可少的,主控系统采用的是MAX708,其是具有比较器、手动复位输入、两组电平输出的微控制器芯片。液晶显示与按键模块:采用经典的四按键与12864点阵液晶的设计,能够对显示菜单比较合理的操作,在系统中用GPIO 控制。存储模块:主要用来保存用户参数的和系统的运行参数(比如用户密码、操作员管理密码、从变频器采集到的脉冲数等)。存储芯片选用了基于铁电技术的 64K 位非易失性铁电存储器FM24CL64,与微控制器采用的是标准两线I2C 的接口,这样能够较好地与LPC2294 连接。
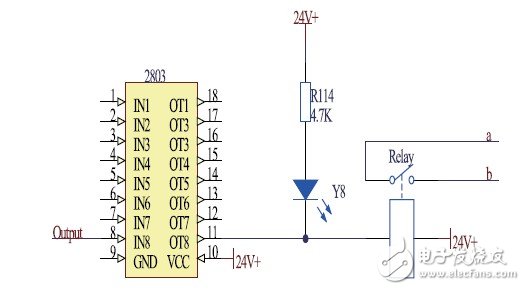
图5 继电器输出电路。
3 控制系统软件设计
控制系统软件设计时采用了当前主流的keil 集成开发环境。软件设计以抢占式多任务实时操作系统μC/OS 为平台实现[5]了电梯主控系统的调度分配、CAN通信、液晶显示三个任务,如图6 所示。
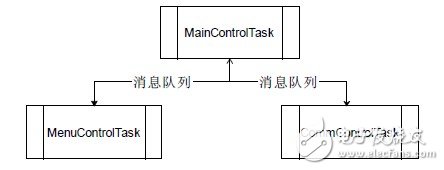
图6 系统控制通信图。
任务之间通信以消息队列和邮箱方式进行通信。
在与硬件接口上根据LPC2294 芯片手册和应用的需要,完成了CAN 模块的驱动、I2C 的总线模块的驱动、和GPIO 的模式的按键和12864 点阵液晶驱动,这样使得在μC/OS 的任务中无需关注LPC2294 芯片板上资源的具体使用,而只需要调用相应的接口函数,方便了系统软件的升级和改动。
3.1 主控调度任务
在主控调度任务中完成当前梯呼梯信号的整合,然后再根据当前收集到的群控正常等输入信号判断当前梯的运行状态(如自动状态、消防状态、锁梯状态等),做出当前状态的处理;在电梯处在可调度的状态下,根据相应的调度算法完成对电梯的呼梯的合理配置;并通过消息队列和邮箱与CAN 通信任务、液晶显示任务进行任务间通信,完成数据的交互。
3.2 CAN 通信任务
原则上对4 路CAN 控制器的资源分配为:CAN0外呼通信、CAN1 内召通信、CAN2 变频器通信、CAN3群控子系统通信[7]。但系统中可以在软件上进行相应的配置,然后使得任意CAN 控制
- 纯电动车电池管理系统设计(02-14)
- CAN总线镍氢电池管理解决方案(04-23)
- 数字电源管理技术及电源管理总线(10-10)
- 电源:UPS“双总线输出”供电系统用负载自动切换开关(上)(11-17)
- CAN总线在机车监控系统中的应用(04-04)
- LIN总线在汽车车灯在线诊断系统中应用(06-20)