基于开关电流芯片MC331647的LED驱动器设计
1 引言
大功率白光LED是新一代半导体光源,属于非线性负载。由于无法大范围精确地描述其负载特性,因此通过电压型驱动器无法有效地控制LED的发光特性。当负载电压有微小波动就可引起电流很大的变化,从而使亮度发生较大变化。如果负载电压波动过大,则可能将LED烧坏。LED负载电流与LED的发光亮度、色温、效率、光通量以及使用寿命紧密相关。因此,超高亮度LED通常都采用恒流源驱动。虽然大功率白光LED的发效率比较高,但总体效率不仅取决于LED本身,也与驱动电路有关,因此设计电流型开关转换器是满足LED应用的高功率及高效率要求的理想驱动方案。
2 LED驱动器的设计思想
由于该驱动器主要用于汽车照明,其电源主要是蓄电池,因此需要一个DC/DC转换器来准确调节LED的恒定电流,进而获得LED光强的一致性和颜色的完整性。车载系统的LED照明工作方式变化范围较大,故其驱动器也应适于不同的应用需要。汽车电池的标准电压为12 V,电池电压在电量耗光时可能降至8 V,而发动机运行时交流发电机则可能将其电压充至14 V。由于汽车电池电压的变化范围很宽,所要求的输出电压就可能高于或低于输入电压,故LED驱动器需要采用升一降压的电路结构来适应保持LED的恒流要求。
考虑LED驱动器作为电流控制系统的本质特点,选择通用开关电源芯片MC33167为核心器件,它采用7.5~40 V低压直流供电,芯片内部开关管通过电流最大可达5 A,并且通过配置合适的外围电路就可实现升-降压功能,因此该芯片完全可做为汽车用LED驱动器的核心芯片。
3 开关电源核心芯片的分析研究
LED特种照明驱动器的开关电源芯片采用MC33167,该芯片可提供多种功能,其内部结构如图1所示。如超过5 A的输出开关电流,无需外接电阻即可提供5 V的输出,内部2%精度的基准源,可提供欠电压保护和内部热保护,各种保护模式可使电路工作在安全状态下。在保护模式可将电源电流降至36μA,大大降低芯片的功耗。内置72 kHz固定频率的振荡器,可使开关电源输出较高频率的PWM,因此在芯片外部使用较小的电感电容就可实现滤波作用,大大简化了外部元件。
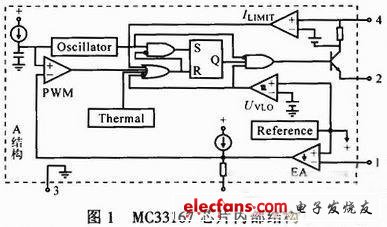

芯片5脚电位U5与输出电位U2对应关系如图2所示。芯片1脚电位U1变化时(U1与标准电压5.05 V不相等时),U5则相应成比例变化,U5与晶振产生的锯齿波经过PWM运算放大器的比较,输出高电平或低电平,然后经过内部逻辑电路运算控制开关管的导通或关断,从而控制U2。因此随着U5的变化,输出开关管的开关时间也就不同,即U2的占当比发生变化,从而控制输出电压的大小。当U1降低时,U5升高,同时控制U2的占空比升高,平均值增加,所以输入U1与输出U2成反比变化。因此在芯片外部增加负反馈电路就可以形成稳定的电源。
4 LED驱动器电路开发
4.1 从电压源到电流源的结构设计
电压源电路中,其输出电压必然为U1=5 V,即电源芯片内部的基准电压,否则电路无法稳定。经过实际电路的测试,试验结果显示电路工作正常,可以获得稳定的输出电压Uo=5 V。由电压源可进一步改变芯片外部的反馈形式,使之成为电流反馈,从而设计电流源。
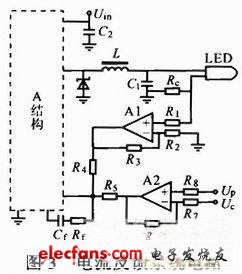
电流源电路如图3所示,通过外部叠加电压Uc来控制输出电流。由叠加原理可知:

IL为负载电流,若取R4=R5,R6=R7,Uref=5 V,单片机输出的控制电压Uc为0~5 V,偏置电压Up为5 V。当Uc=0时,IL=0;当Uc=5 V时,IL=1 A,采样电阻Rc=0.25 Ω,可得:IL=0.2Uc。因此通过调整控制Uc的大小,可以线性控制输出电流的值。
4.2 LED驱动器的闭环稳定性分析
由上述可知驱动器控制系统各部分的传递函数,当PWM输出接LC滤波器时,可以得到其总体控制结构如图4所示。
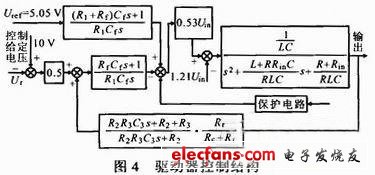
综合考虑LED驱动器的用途,在设计时控制系统首要考虑系统稳定性和控制精度,同时驱动器主要用于汽车,外界干扰比较大,而且调光速度不会很快,因此系统带宽不需要很大。取滤波电感200μH,电容20μF,此时滤波器谐振频率ωn=15.8 krad·s-1,驱动器开关频率ω=452 krad·s-1,所以输出纹波衰减约818倍,完全满足滤波要求;实测电感电阻及电源芯片内阻之和Rin=0.1Ω,负载电阻10Ω,阻尼系数ξ=0.4 73,此处选择较小的ξ也有利于滤除纹波;电流采样电阻0.1 Ω,滞后校正电路中R2=100 Ω,R3=10 kΩ,C3=1μF,两个转折频率ω1=100 rad ·s-1,ω2=10 krad·s-1,因此有效地降低系统高频增益,并且消除了ξ对系统稳定性的影响;同时驱动器PI控制器中Rf=2 000Ω,Cf=1μF,
led驱动电路设计 MC331647 LED驱动器 相关文章:
- 三路输出LED驱动器可驱动共阳极LED串(08-17)
- LED向“绿色”转变需要高性能LED驱动器(08-17)
- LED照明的操作要求对驱动器IC性能构成压力(08-17)
- 大电流/高速LED驱动器彻底改变了PWM调光(08-19)
- 创新性LED驱动器简化HDTV显示器背光照明(08-17)
- 新的汽车显示屏需要能提供30,000:1调光比的背光照明LED驱动器(08-23)