单片机典型案例开发(二)
1 系统结构及工作原理
该系统采用PC 机作为上位机监控单元,AT89S51单片机作为下位机控制器,其外围设备包括温度、湿度检测模块, 温、湿度输出控制模块,键盘输入模块、LCD显示模块及上下位机通信模块、报警模块等。其中外围设备采用RS 485 串行通信接口方式和上位机实现远程数据交换, 用以实现向用户发送信息, 用户对设备进行操作处理等功能。系统结构如图1 所示。
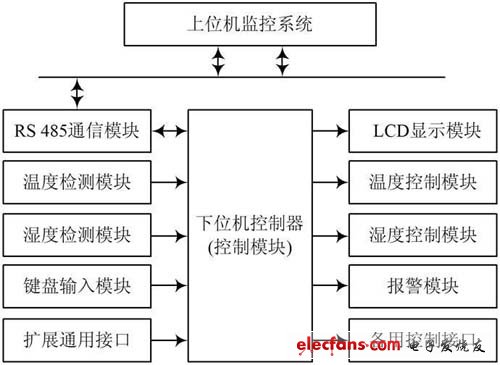
图1 系统结构图
本系统可以通过键盘设定模块或者上位机下装模块进行系统给定值的设置来调整仓库温、湿度控制范围。温度、湿度检测模块将仓库内的温、湿度信息传到单片机, 单片机根据实际情况发出控制信号驱动控制模块进行相应操作, 同时将当前信息存储到单片机相应内存单元中并上传数据到上位机显示及保存。当温度或者湿度超过设定的范围上下限时, 控制器将会启动或者停止相应设备来调整环境湿度和温度, 同时将各种调整信息在LCD 上显示并发出报警信号。控制信息同时在上位机显示并报警, 建立控制日志保存。另外还可以设计一些通用接口, 为以后设备功能扩展提供方便。
2 系统硬件设计
2. 1 控制器的设计
此系统下位机采用模块化设计, 由AT 89S51 主控芯片, 温、湿度检测模块, 输出控制模块, 键盘输入模块,LCD 显示模块, 上下位机通信模块等几部分组成。温、湿度检测模块使用数字温度传感器DS18B20 测量仓库的温度, 使用温、湿度传感器SHT11 测量湿度。输出控制模块的控制信号由单片机控制器提供, 通过光电隔离器传送信号到继电器控制各执行电机动作来调节仓库的温、湿度。单片机的P2. 0~ P2. 4 接口分别作为驱动空调加热制冷、循环风机、排湿窗风门的I/ O 接口。
在I/ O 接口输出电平为0 时, K1 开关断开, 相应执行电机不工作; 在I/ O接口输出电平为1 时, 光电隔离器输出信号使K1 开关闭合, 相应执行电机工作。键盘和通信模块采用查询方式实现对控制系统的设置, 从而达到对系统温、湿度值和其限定范围的及时调节。如果出现异常情况, 设备将立即通过RS 485 将事件传送给远程主机, 发出报警信号。
2. 2 温度检测模块
此系统的温度检测模块根据仓库面积的大小可增加多处检测点, 而数字温度传感器DS18B20就具有支持多点组网的功能, 可将多个DS18B20 并连在惟一的三线上, 实现多点温度检测, 其测温范围为- 55~+ 125 , 固有测温分辨率为0. 5 , 工作电源为DC 3~ 5 V, 测量结果以9~ 12 位数字量的方式串行传送。其检测电路如图2 所示。
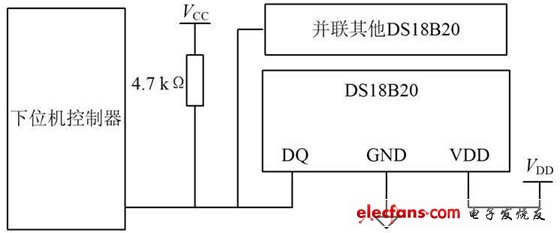
图2 温度检测模块电路
2. 3 湿度检测模块
湿度测量模块为了节省控制器I/ O 接口并方便以后的芯片功能扩展, 采用SHT 11 温、湿度传感器。
此传感器是高度集成, 将温度感测、湿度感测、信号变换、A/ D 转换和加热器等功能集成到一个芯片上, 提供二线数字串行接口SCK 和DAT A, 接口简单, 支持CRC 传输校验, 传输可靠性高, 测量精确度高, 由于同时集成温、湿度传感器, 可以提供温度补偿的湿度测量值和高质量的露点计算功能。SHT 11 可通过DA TA数据总线直接输出数字量湿度值。该湿度值称为 相对湿度!, 需要进行线性补偿和温度补偿后才能得到较为准确的湿度值。由于相对湿度数字输出特性呈一定的非线性, 因此为了补偿湿度传感器的非线性, 可按下式修正湿度值:

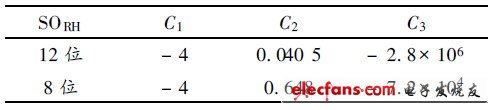
式中: RH linear为经过线性补偿后的湿度值; SORH 为相对湿度测量值; C1 , C2 , C3 为线性补偿系数, 取值如表1所列。
表1 湿度线性补偿系数
而实际温度和测试参考温度25 有所不同, 所以对线性补偿后的湿度值进行温度补偿很有必要。补偿公式如下:

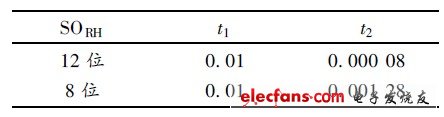
式中: RH true为经过线性补偿和温度补偿后的湿度值; T为测试湿度值时的温度( 单位: ℃ ) ; t1 和t2 为温度补偿系数, 取值如表2 所示。
表2 湿度值温度补偿系数
具体湿度检测模块电路如图3 所示。
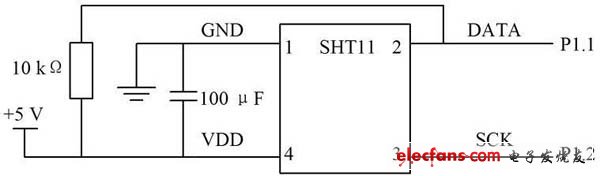
图3 湿度检测模块电路
2. 4 输出驱动控制模块及报警模块
输出驱动控制模块通过控制芯片产生电信号, 控制相应的设备运转或者停止, 实现仓库温度和湿度的自动调节。当检测到的温度和湿度值大于或小于设定值时,报警模块同时会发生报警信号通知用户注意当前状况,必要时需采取相应人工措施。
3 系统软件设计
由于温、湿度变化规律性不强, 被检测对象的温、湿度具有非线性、热惯性、时变性等特点, 较难建立精确的数学模型。而模糊控制算法不需要建立精确的数学模型, 可依据人工实际操作经验, 将其抽象为一系列的控制算法后通过计
- 单片机典型案例开发(三)(03-23)
- 单片机学习知识点全攻略(二)(05-12)
- 单片机学习知识点全攻略(三)(05-15)
- 单片机学习知识点全攻略(完结篇)(05-21)
- 单片机学习知识点全攻略(一)(05-08)