基于SoC FPGA的工业和马达控制方案设计
相同的成本下器件的性能更好。
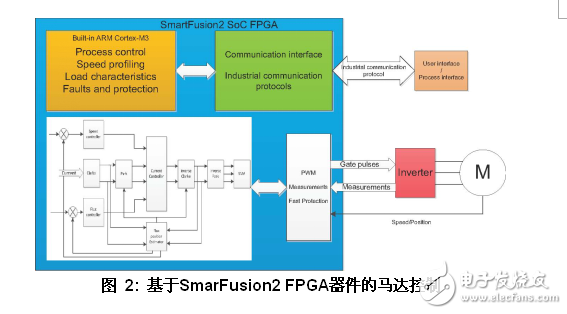
图 2: 基于SmarFusion2 FPGA器件的马达控制
马达控制IP模块
PI控制器
比例积分(PI)控制器是用于控制系统参数的反馈机制,PI控制器具有两个可调节的增益参数,用于控制控制器的动态响应——比例增益常数和积分增益常数。PI控制器的比例分量是比例增益常数和误差输入的乘积,而积分分量则是累积误差和积分增益常数的乘积。而后,这两个分量相加。PI控制器的积分阶段会导致系统不稳定,这是由于数据值不可控制的增加。这种不可控制的数据增加称为卷积(wind-up),所有PI控制器实施方案包括一个抗卷积 (anti-windup)机制,用于确保控制器输出是有限的。美高森美PI控制器IP模块使用保持饱和(hold-on-saturation)算法来实现抗卷积,这个模块还提供设置初始输出值的附加特性。
图3所示为无刷FOC算法框图,这些模块作为IP core以供使用,本节将会逐一对他们展开讨论。
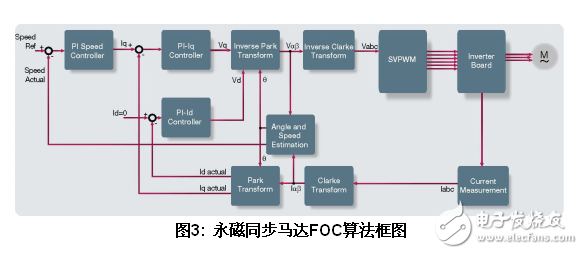
图3: 永磁同步马达FOC算法框图
FOC变换
磁场定向控制(FOC)是通过独立地确定和控制转矩和磁化电流分量来提供最佳马达电流的算法,在永磁同步马达(PMSM)中,转子已经磁化,因此,为马达提供的电流只用于转矩。FOC是计算密集算法,但是,美高森美马达控制参考设计已经针对器件资源的最优化而构建的,FOC算法包括Clarke、Park、逆Clarke和逆Park变换。
位置和速度估算器
FOC需要精确的转子位置和速度作为输入,精确确定转子角度对于确保低功耗是必不可少的。增添确定位置和速度的物理传感器,导致系统的成本增加,并降低可靠性。无传感器算法有助于省去传感器,但是增加了计算复杂性。
PLL
锁相环(PLL)用于同步信号,PLL在很多应用中有使用,比如角度估算和逆变器的网格同步。
速率限制器
速率限制器模块可以实现系统变量或输入的平滑改变。例如,在马达控制系统中,如果马达所需的速度出现突变,系统可能变得不稳定。为了避免此类现象,速率限制器模块用于从初始速度转变到所需的速度。速率限制器模块可以进行配置以控制速率的改变。
空间矢量调制
空间矢量调制模块提升了DC总线利用率,并且消除了晶体管开关的短脉冲。与使用正弦PWM相比,可将DC总线利用率提升15%。
三相 PWM 生成
在所有计算的最后,可以得到三相马达电压。这些电压用于生成逆变器中晶体管的开关信号,PWM模块为六个(三个高侧和三个低侧)晶体管产生开关信号,并且具有死区时间和延迟时间插入等先进特性。可编程的死区时间插入特性有助于避免逆变器引脚上的灾难性短路情况,这种情况是由于晶体管的关断时间而发生的。可编程的延迟插入特性使ADC测量与PWM信号生成能够同步。该模块可以配置成与仅由N-MOSFET组成的逆变器或同时由N-MOSFET和P-MOSFET组成的逆变器一起工作。
在 SoC中调试 FPGA设计
通常,与在FPGA器件上进行调试相比,在微控制器上调试设计相对比较容易。在SoC中,可以利用FPGA器件的高性能,同时保持在微控制器中更快速调试的优势。美高森美SmartFusion2 SoC FPGA中的微控制器子系统和FPGA架构可以通过AMBA APB or AXI总线相互通信。这样可以把测试数据注入FPGA架构中,或者从FPGA架构中记录调试数据,从而帮助实现运行时间的内部数据可视化,用于实时调试。固件代码可以按步运行,在代码中可以设置断点来分析FPGA寄存器数据。
基于 SmartFusion2 SoC FPGA的多轴马达控制解决方案通过USB连接至主机PC,并且与图形用户界面(GUI)通信,进行启动和停止马达,设置马达速度数值和其它系统参数,并且可表示多达四个系统变量,比如马达速度、马达电流和转子角度。
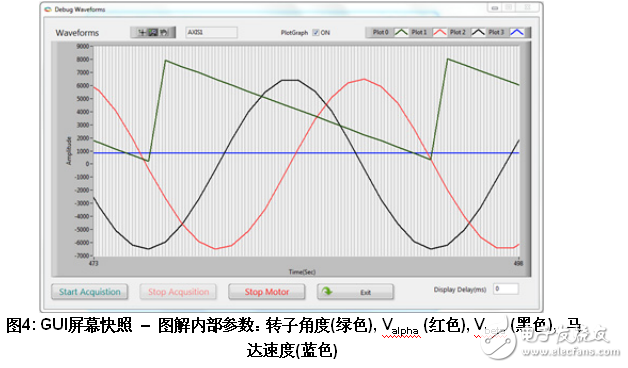
图4: GUI屏幕快照 – 图解内部参数:转子角度(绿色), Valpha (红色), Vbeta (黑色), 马达速度(蓝色)
生态系统
美高森美提供丰富的IP库,包括先前章节讨论的实现多项马达控制功能的IP模块。这些模块可以轻易进行定制,并且可以在美高森美FPGA器件之间进行移植。使用Libero SoC软件中的SmartDesign工具,用户可以通过图形形式配置和相互连接这些模块。借助这些IP模块,设计人员能够显着减少在FPGA器件中实施马达控制算法所需的时间。
这些IP模块在速度高达30,000 RPM和开关频率高达400kHz的运行马达中进行了测试。
工业通信协议
工业网络的发展趋势是使用网络来替代点至点通信,从而实现更快的通信速度。实施此类高速通信需要更高的带宽支持,这对于微控制器或DSP同时处理马达控制算法并不容易。在许多案例中,需要使用一个
- 最新知名厂商电机控制解决方案集锦(07-15)
- 大联大旗下友尚集团推出多个马达控制方案(06-30)
- 大联大旗下凯悌集团推出马达控制解决方案(06-24)
- 车载转换器与马达控制MCU应用指南(05-06)
- 如何使创新的MCU实现高效节能电机控制?(07-07)
- 马达控制小Tips(1):如何实现步进电机的基本控制?(07-19)