步进电机数控解决方案
传统的电流式控制方法是检测流经绕组的电流,并将反馈信号送到控制芯片,然后由控制芯片决定是增加还是降低绕组电流,以取得所需的电流强度。这种控制方法使电机在宽转速和宽电源电压范围内保持理想的转矩,非常适用于全步进和半步进电机驱动,而且实现起来非常容易。
闭环控制电路将电流施加到绕组。反电动势(BEMF)会降低绕组电压,延长电流达到理想值的时间,因此,反电动势限制电机转速。虽然系统无需知道反电动势值,但是,不重视且不修正这个数值将会导致系统性能降低。
因为电源电压变化导致峰值电流有时波动幅度很大,所以,直到现在,工程师还是尽量避免使用电压式控制方法。工程师们还想避免反电动势随着电机转速增加而升高的问题。
在这种情况下,业内出现了能够补偿反电动势的智能电压式控制系统。这种驱动方法使电机运转更顺畅,微步分辨率更高,是对高精度定位和低机械噪声要求严格的应用的理想选择。电压式控制是一种开环控制:当正弦电压施加到电机相位时,机电系统将回馈正弦电流。
我们可以用数字方法补偿反电动势和峰流变化。在记住电机的准确特性(电机电感-转速曲线、反电动势-转速曲线、电机电阻)后,计算并施加电压,以取得理想的电流值。
电压式控制方法是向电机施加电压,而不是恒流。施加的电压值能够补偿并完全消除反电动势效应,施加电压的上升速率与因电机转速增加而导致反电动势上升的速率相同,保证电流幅度对转速曲线平坦。在已知所需电流后,就可以确定取得该电流需要施加的准确电压值。因此,电流是由电压间接控制,如图1所示。
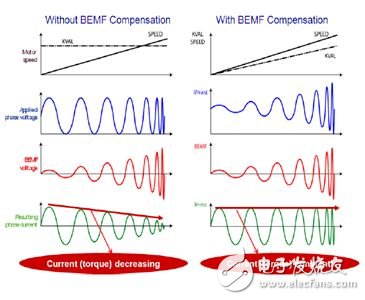
图1:反电动势(BEMF)补偿
电压式控制还节省了分流电阻,可取得高微步分辨率和极低的转矩脉动。事实上,意法半导体的L6470取得了多达128步的微步控制。
这款数字电机控制驱动器的核心是一个能够降低微控制器资源占用率的数字运动引擎(DME)。
数字运动控制引擎是由行为命令控制,例如,绝对位置请求,并按照预设转速曲线边界驱动电机运动。全部指令集包括相对位置和绝对位置(达到目标位置)、转速跟踪(达到并保持目标转速)和电机停止顺序,还包括机械位置传感器管理专用命令。图2所示是前述部分命令。
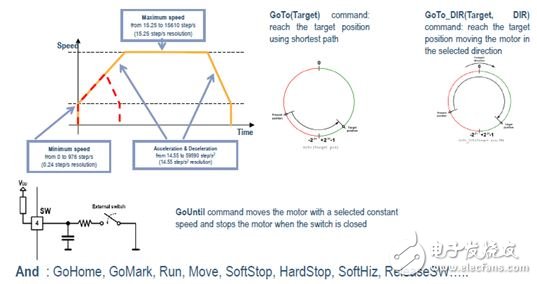
图2:行为命令
该控制器通过具有菊花链功能的高速SPI总线接口与主微控制器通信。
通过一个串行接口,一个微控制器能够管理多个控制器,从而控制多台步进电机,如图3所示。
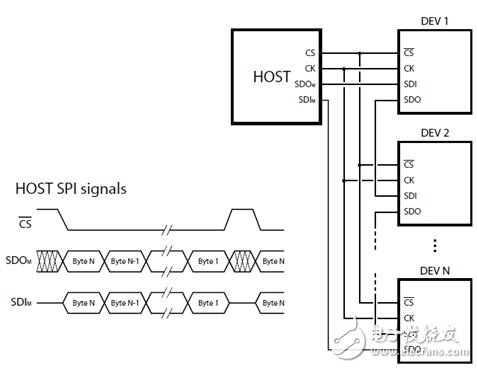
图3:SPI接口菊花链拓扑
- 数字电路中显示译码器设计的分析与研究(07-12)
- 数字电路设计中部分常见问题解析(01-15)
- 音频专家潘昶:如何进行数码播放器的开发和评估?(02-18)
- 基于可编程逻辑器件的数字电路设计(10-16)
- 数字电路中Multisim10单片机的应用(08-16)
- EDA技术进行数字电路设计(02-24)