基于压力传感触控技术的智能地板应用
2013。设计的软件界面如图3所示。
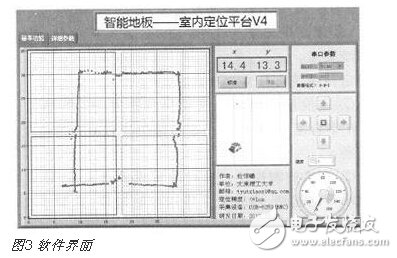
3.1 定位显示模块
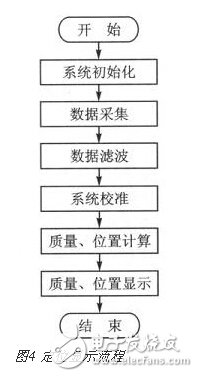
定位显示模块的输入为16个压力传感器的数据,经过滤波和计算,输出为定位平台上物体重心的位置。位置显示方式包括文本坐标和二维图片,路径显示方式为XY图。定位显示流程如图4所示。
3.2 运动控制模块
运动控制模块是通过在PC机和小车间建立蓝牙通信实现的。不具备蓝牙功能的PC机可通过蓝牙适配器和BlueSoleil软件实现蓝牙功能,小车端通过UART接口连接一蓝牙透传模块,此时,PC机端和小车端建立了虚拟串口连接,LabVIEW端通过VISA串口通信编程实现向小车发送运动指令。本模块可完成对小车的速度控制以及前进、后退、左转、右转、停止5种运动状态控制。
3.3 远程监视模块
远程监视模块中,PC机为位置管理服务器,Android终端为客户机,网络架构采用分布式Publisher-Subscriber模式,PC机为所有注册的Android终端提供位置查询服务。
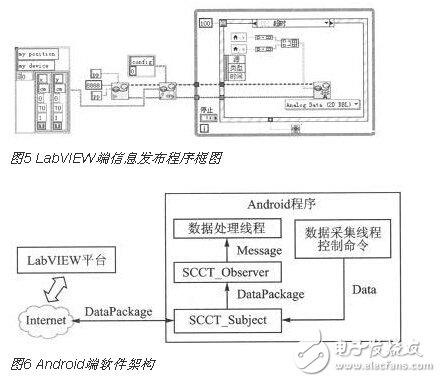
远程监视模块采用了跨平台网络通信插件SCCT。SCCT(Smart Phone&Cross-Plat-form Communication Toolkit,智能手机跨平台通信包)是由T4SM(Tools for Smart Minds SoftwareSolutions)公司研发的、支持多种平台和编程语言的开发包,用于多种平台与LabVIEW平台之间进行数据通信。SCCT支持的操作系统包括Windows、Linux、iOS、Android、Phone7,支持的编程语言包括LabVIEW、Java、C、Object C、.NET和Javascript(HTML5)。本系统中,LabVIEW端采用SCCTPublisher Library提供的VI实现验证请求连接的订阅者身份、检查连接状态、广播数据至所有活动状态的订阅者以及接收订阅者请求的功能,Android端采用SCCT Subscriber Library提供的API实现发送请求至发布者、接收数据并提交至界面进行显示等功能。
LabVIEW端信息发布程序框图如图5所示。Android端的软件架构如图6所示。
4 系统测试与结果分析
Android手机端远程监视界面如图7所示。

经测试,本系统实现了对小车的定位显示、运动控制和远程监视的功能。
在定位精度的测试中,在平台上画有位置参照网格,网格边长为1 cm。在定位平台上随机选取10个测试点,在每个点处施加压力,测量6次,记录软件计算出的坐标,并与实际网格坐标进行比较。在数据分析过程中,定义以下概念:
①偏差Xp、Yp。假设在物理平台上测试点的网格坐标取值范围为X∈[a,b],Y∈[c,d](a、b、c、d为非负整数,b-a=d-c=1,单位为cm)通过软件求得的坐标为(x,y),定义偏差Xp、Yp:
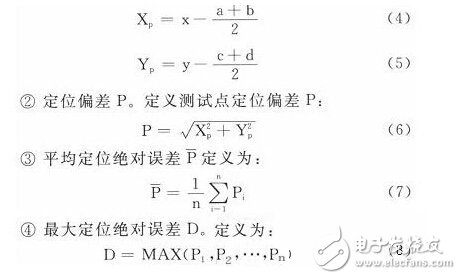
式中,MAX()为最大值;Pi为第i个测试点的定位偏差(cm)。
经测试,P=0.6 cm,D=1.8 cm。因此,单块智能地板的定位绝对误差在2 cm内。在智能地板特性不变的前提下,由多块智能地板拼成的更大面积定位空间的定位绝对误差也在2 cm内。
结语
本文设计了一种智能地板,并基于该地板构建了一个定位系统,实现了通过PC机LabVIEW软件和Android手机软件查看智能地板上物体位置和运动路径信息的功能。本定位系统最大定位绝对误差在2 cm内,且具有环境鲁棒性好、无负担性等优点,与其他定位技术结合,可弥补现有室内定位系统的不足。此外,本智能地板还可用于重点区域安防、隐私保护下的监控等场合。
- 科普互电容式触控技术(02-06)
- 简述汽车电容触摸屏的发展现状(02-06)
- 多点触控技术医疗新应用:床边医疗照护系统(02-23)
- 汽车触控引潮流 触控双雄解决方案集锦(05-06)
- 智能家居多功能一体化触屏遥控器方案解析(11-02)
- 三维触控技术详解 突破“二向箔”的束缚(11-06)